Conference papers
-
- titre
- Marker-based Registration for Large Deformations -Application to Open Liver Surgery
- auteur
- Yinoussa Adagolodjo, Nicolas Golse, Eric Vibert, Michel de Mathelin, Stéphane Cotin, Hadrien Courtecuisse, Yinoussa Adagolodjo
- article
- ICRA 2018 - International Conference on Robotics and Automation, May 2018, Brisbane, Australia
- Resume_court
- This paper introduces an Augmented Reality (AR) system for open liver surgery. Although open surgery .....
- Accès au texte intégral et bibtex
-



-
- titre
- Silhouette-based Pose Estimation for Deformable Organs Application to Surgical Augmented Reality
- auteur
- Yinoussa Adagolodjo, Raffaella Trivisonne, Nazim Haouchine, Stéphane Cotin, Hadrien Courtecuisse, Yinoussa Adagolodjo
- article
- IROS 2017 - IEEE/RSJ International Conference on Intelligent Robots and Systems, Sep 2017, Vancouver, Canada
- Resume_court
- — In this paper we introduce a method for semi-automatic registration of 3D deformable models usin .....
- Accès au texte intégral et bibtex
-

-
- titre
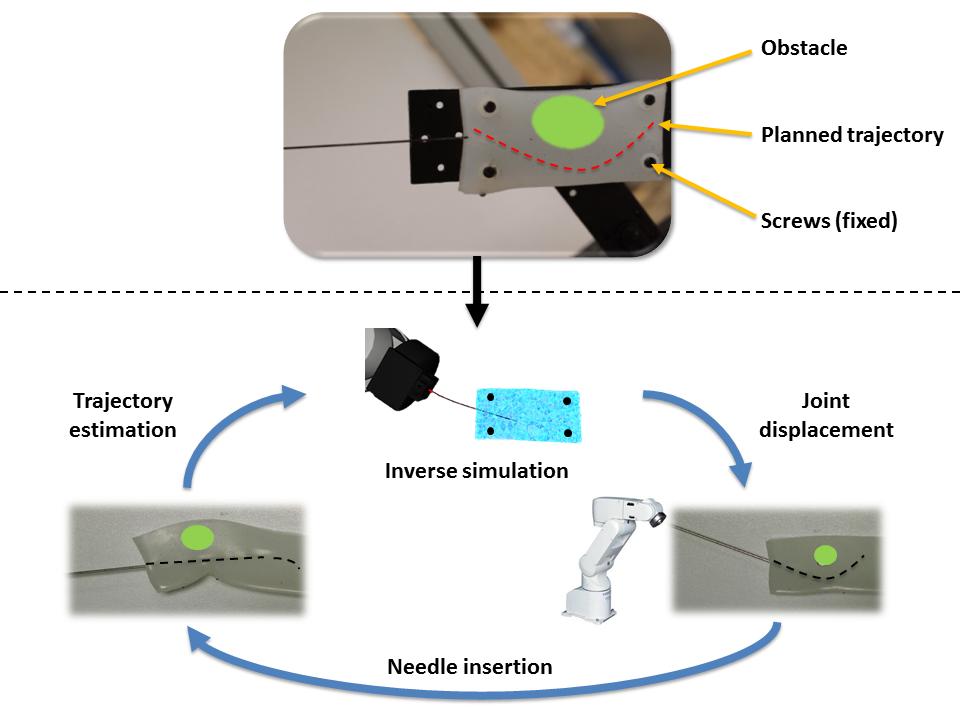
- Inverse real-time Finite Element simulation for robotic control of flexible needle insertion in deformable tissues
- auteur
- Yinoussa Adagolodjo, Laurent Goffin, Michel de Mathelin, Hadrien Courtecuisse
- article
- IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2016) , Oct 2016, Daejeon, South Korea
- Resume_court
- This paper introduces a new method for automatic robotic needle steering in deformable tissues. The .....
- Accès au texte intégral et bibtex
-
Theses
-
- titre
- Coupling rObotics aNd mEdical simulations for automatiC percuTaneous procedures (CONECT)
- auteur
- Yinoussa Adagolodjo, Yinoussa Adagolodjo
- article
- Optimisation et contrôle [math.OC]. Université de Strasbourg, 2018. Français. ⟨NNT : ⟩
- Resume_court
- Needle-based interventions are among the least invasive surgical approaches to access deep internal .....
- Accès au texte intégral et bibtex
-
