2025
Journal articles
-
- titre
- Modeling, Embedded Control and Design of Soft Robots using a Learned Condensed FEM Model
- auteur
- Tanguy Navez, Etienne Ménager, Paul Chaillou, Olivier Goury, Alexandre Kruszewski, Christian Duriez
- article
- IEEE Transactions on Robotics, In press, ⟨10.1109/TRO.2025.3552353⟩
- Accès au texte intégral et bibtex
-



Conference papers
-
- titre
- Towards Real-Time Simulation of Soft Robots with Contacts using a Method of Hybrid Hyper-Reduction
- auteur
- Olivier Goury, Samuel Mohsen Youssef, Simon Le Berre, Christian Duriez
- article
- ROBOSOFT 2025 - 8th IEEE-RAS International Conference on Soft Robotics, Cosimo della Santina; Josie Hughes, Apr 2025, Lausanne, Switzerland. pp.1-6
- Accès au texte intégral et bibtex
-

-
- titre
- In silicone and in silico: toward evaluation of pacemaker lead implantation based on soft robotics and computer simulation
- auteur
- Thomas Moupfouma, Quentin Peyron, Yinoussa Adagolodjo, Sylvain Caubet, Jean-François Ollivier, Christian Duriez
- article
- RoboSoft 2025 - IEEE 8th International Conference on Soft Robotics, Apr 2025, Lausanne, France. pp.1-8, ⟨10.1109/RoboSoft63089.2025.11020816⟩
- Accès au texte intégral et bibtex
-

Preprints, Working Papers, ...
-
- titre
- Using Haptic Feedback in Digital Rectal Examination Training
- auteur
- Sizhe Tian, Yinoussa Adagolodjo, Jeremie Dequidt
- article
- 2025
- Accès au texte intégral et bibtex
-

2024
Journal articles
-
- titre
- A Zero-Shot Reinforcement Learning Strategy for Autonomous Guidewire Navigation
- auteur
- Valentina Scarponi, Michel Duprez, Florent Nageotte, Stéphane Cotin
- article
- International Journal of Computer Assisted Radiology and Surgery, 2024, 19, pp.1185-1192. ⟨10.1007/s11548-024-03092-4⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Sim-to-Real Transfer of Soft Robotic Navigation Strategies That Learns from the Virtual Eye-in-Hand Vision
- auteur
- Jiewen Lai, Tian-Ao Ren, Wenchao Yue, Shijian Su, Jason Y. K. Chan, Hongliang Ren
- article
- IEEE Transactions on Industrial Informatics, 2024, 20 (2), pp.2365-2377. ⟨10.1109/TII.2023.3291699⟩
- Accès au texte intégral et bibtex
-

Conference papers
-
- titre
- Towards realistic needle insertion training simulator using partitioned model order reduction
- auteur
- Félix Vanneste, Claire Martin, Olivier Goury, Hadrien Courtecuisse, Erik Pernod, Stéphane Cotin, Christian Duriez
- article
- MICCAI 2024 - International Conference on Medical Image Computing and Computer-Assisted Intervention, Oct 2024, Marrakech, Morocco. ⟨10.1007/978-3-031-72089-5_62⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Linear compliant control design for soft robots
- auteur
- Antoine Alessandrini, Alexandre Kruszewski
- article
- ICRA 2024 - 40th IEEE International Conference on Robotics and Automation - ICRA@40, IEEE, Sep 2024, Rotterdam, Netherlands
- Accès au texte intégral et bibtex
-

-
- titre
- Condensed semi-implicit dynamics for trajectory optimization in soft robotics
- auteur
- Etienne Ménager, Alexandre Bilger, Wilson Jallet, Justin Carpentier, Christian Duriez
- article
- IEEE International Conference on Soft Robotics (RoboSoft), IEEE, Apr 2024, San Diego (CA), United States. ⟨10.1109/RoboSoft60065.2024.10521997⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Learning control strategy in soft robotics through a set of configuration spaces
- auteur
- Etienne Ménager, Christian Duriez
- article
- IEEE International Conference on Soft Robotics (RoboSoft), IEEE, Apr 2024, San Diego (CA), United States
- Accès au texte intégral et bibtex
-

Reports
-
- titre
- Mechanical compliance: from soft robot modeling theory to finite element method computation
- auteur
- Christian Duriez
- article
- RT-0521, INRIA - Centre Lille Nord Europe. 2024
- Accès au texte intégral et bibtex
-


2023
Journal articles
-
- titre
- VisAdapt: Catadioptric Adaptive Camera for scenes of variable density of visual information
- auteur
- Julien Jean Ducrocq, Guillaume Caron, Hervé Midavaine, Christian Duriez, Jérémie Dequidt, El Mustapha Mouaddib
- article
- Applied optics, 2023, 62 (35), pp.9207-9214. ⟨10.1364/AO.500663⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Augmented reality in liver surgery
- auteur
- Belkacem Acidi, Mohammed Ghallab, Stéphane Cotin, Eric Vibert, Nicolas Golse
- article
- Journal of Visceral Surgery, 2023, 160 (2), pp.118-126. ⟨10.1016/j.jviscsurg.2023.01.008⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Constraint-based Simulation of Passive Suction Cups
- auteur
- Antonin Bernardin, Eulalie Coevoet, Paul Kry, Sheldon Andrews, Christian Duriez, Maud Marchal
- article
- ACM Transactions on Graphics, 2023, 42 (1), pp.1-14. ⟨10.1145/3551889⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Toward the use of proxies for efficient learning manipulation and locomotion strategies on soft robots.
- auteur
- Etienne Ménager, Quentin Peyron, Christian Duriez
- article
- IEEE Robotics and Automation Letters, In press, ⟨10.48550/arXiv.2310.17029⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Modeling and Control of a 5-DOF Parallel Continuum Haptic Device
- auteur
- Margaret Koehler, Thor Morales Bieze, Alexandre Kruszewski, Allison Okamura, Christian Duriez
- article
- IEEE Transactions on Robotics, 2023, 39 (5), pp.3636-3654. ⟨10.1109/TRO.2023.3277068⟩
- Accès au texte intégral et bibtex
-

Conference papers
-
- titre
- Intraoperative CT augmentation for needle-based liver interventions
- auteur
- Juan Verde, Nicolas Padoy, Stéphane Cotin, Sidaty El Hadramy
- article
- MICCAI 2023, Oct 2023, Vancouver, Canada
- Accès au texte intégral et bibtex
-

-
- titre
- Shape Servoing of a Soft Object Using Fourier Series and a Physics-based Model
- auteur
- Fouad Makiyeh, François Chaumette, Maud Marchal, Alexandre Krupa
- article
- IROS 2023 - IEEE/RSJ International Conference on Intelligent Robots and Systems, Oct 2023, Detroit (MI), United States. pp.6356-6363
- Accès au texte intégral et bibtex
-

-
- titre
- Direct and inverse modeling of soft robots by learning a condensed FEM model
- auteur
- Etienne Ménager, Tanguy Navez, Olivier Goury, Christian Duriez
- article
- ICRA 2023 - IEEE International Conference on Robotics and Automation, May 2023, London, United Kingdom. pp.530-536, ⟨10.1109/ICRA48891.2023.10161537⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Efficient Needle Insertion Simulation using Hybrid Constraint Solver and Isolated DOFs
- auteur
- Claire Martin, Ziqiu Zeng, Hadrien Courtecuisse
- article
- Eurographics 2023 - Short Papers, May 2023, Saarbrücken, Germany. ⟨10.2312/egs.20231003⟩
- Accès au texte intégral et bibtex
-

Theses
-
- titre
- Exploring state descriptions and soft robot simulations for learning and control
- auteur
- Etienne Ménager
- article
- Computer science. Université de Lille, 2023. English. ⟨NNT : 2023ULILB055⟩
- Accès au texte intégral et bibtex
-

Preprints, Working Papers, ...
-
- titre
- An efficient implicit constraint resolution scheme for interactive FE simulations
- auteur
- Ziqiu Zeng, Hadrien Courtecuisse
- article
- 2023
- Accès au texte intégral et bibtex
-

-
- titre
- Efficient parallelization strategy for real-time FE simulations
- auteur
- Ziqiu Zeng, Hadrien Courtecuisse
- article
- 2023
- Accès au texte intégral et bibtex
-

- titre
- An Open Source Design Optimization Toolbox Evaluated on a Soft Finger
- auteur
- Stefan Escaida Navarro, Tanguy Navez, Olivier Goury, Luis Molina, Christian Duriez
- article
- 2023
- Accès au bibtex
-

2022
Journal articles
-
- titre
- A concise guide to modelling the physics of embodied intelligence in soft robotics
- auteur
- Gianmarco Mengaldo, Federico Renda, Steven L Brunton, Moritz Bächer, Marcello Calisti, Christian Duriez, Gregory S Chirikjian, Cecilia Laschi
- article
- Nature Reviews Physics, 2022, 4 (9), pp.595-610. ⟨10.1038/s42254-022-00481-z⟩
- Accès au texte intégral et bibtex
-

-
- titre
- A Simulation Framework for Magnetic Continuum Robots
- auteur
- Roland Dreyfus, Quentin Boehler, Bradley J. Nelson
- article
- IEEE Robotics and Automation Letters, 2022, 7 (3), pp.8370 - 8376. ⟨10.1109/LRA.2022.3187249⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Real‐Time FE Simulation for Large‐Scale Problems Using Precondition‐Based Contact Resolution and Isolated DOFs Constraints
- auteur
- Ziqiu Zeng, Stéphane Cotin, Hadrien Courtecuisse
- article
- Computer Graphics Forum, 2022, 41 (6), pp.418-434. ⟨10.1111/cgf.14563⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Pose Estimation and Non-rigid Registration for Augmented Reality during Neurosurgery
- auteur
- Nazim Haouchine, Parikshit Juvekar, Michael Nercessian, William Wells, Alexandra Golby, Sarah Frisken
- article
- IEEE Transactions on Biomedical Engineering, 2022, 69 (4), pp.1310 - 1317. ⟨10.1109/TBME.2021.3113841⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Calibration method for soft robots modeled with FEM: application to anisotropy
- auteur
- Félix Vanneste, Olivier Goury, Christian Duriez
- article
- IEEE Robotics and Automation Letters, 2022, ⟨10.1109/LRA.2022.3155784⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Planning of soft-rigid Hybrid arms in Contact with Compliant Environment: application to the transrectal biopsy of the prostate
- auteur
- Eulalie Coevoet, Yinoussa Adagolodjo, Meichun Lin, Christian Duriez, Fanny Ficuciello
- article
- IEEE Robotics and Automation Letters, 2022, 7 (2), pp.4853-4860. ⟨10.1109/LRA.2022.3152322⟩
- Accès au texte intégral et bibtex
-

-
- titre
- DeepPhysics: a physics aware deep learning framework for real-time simulation
- auteur
- Alban Odot, Ryadh Haferssas, Stéphane Cotin
- article
- International Journal for Numerical Methods in Engineering, 2022, 123 (10), pp.2381-2398. ⟨10.1002/nme.6943⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Proximity Perception in Human-Centered Robotics: A Survey on Sensing Systems and Applications
- auteur
- Stefan Escaida Navarro, Stephan Mühlbacher-Karrer, Hosam Alagi, Hubert Zangl, Keisuke Koyama, Björn Hein, Christian Duriez, Joshua R Smith
- article
- IEEE Transactions on Robotics, 2022, 38, pp.1599-1620. ⟨10.1109/TRO.2021.3111786⟩
- Accès au texte intégral et bibtex
-

-
- titre
- SofaGym: An open platform for Reinforcement Learning based on Soft Robot simulations
- auteur
- Etienne Ménager, Pierre Schegg, Elie Khairallah, Damien Marchal, Jérémie Dequidt, Philippe Preux, Christian Duriez
- article
- Soft Robotics, In press
- Accès au texte intégral et bibtex
-

-
- titre
- Visual Haptic Feedback for Training of Robotic Suturing
- auteur
- François Jourdes, Brice Valentin, Jérémie Allard, Christian Duriez, Barbara Seeliger
- article
- Frontiers in Robotics and AI, 2022, ⟨10.3389/frobt.2022.800232⟩
- Accès au texte intégral et bibtex
-

Conference papers
-
- titre
- An Optimal Control Problem for Elastic Registration and Force Estimation in Augmented Surgery
- auteur
- Guillaume Mestdagh, Stéphane Cotin
- article
- MICCAI 2022 - 25th International Conference on Medical Image Computing and Computer Assisted Intervention, Sep 2022, Singapore, Singapore. ⟨10.1007/978-3-031-16449-1_8⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Unscented Kalman Filtering for Real Time Thermometry During Laser Ablation Interventions
- auteur
- Mohammadamin Soltani-Sarvestani, Stéphane Cotin, Paola Saccomandi
- article
- EMBC 2022 - International Engineering in Medicine and Biology Conference, Jul 2022, Glasgow, United Kingdom
- Accès au texte intégral et bibtex
-

-
- titre
- Deliberation in autonomous robotic surgery: a framework for handling anatomical uncertainty
- auteur
- Eleonora Tagliabue, Daniele Meli, Diego Dall'Alba, Paolo Fiorini
- article
- 2022 IEEE International Conference on Robotics and Automation (ICRA 2022), IEEE, May 2022, Philadelphie, PA, United States
- Accès au texte intégral et bibtex
-

-
- titre
- Automated planning for robotic guidewire navigation in the coronary arteries
- auteur
- Pierre Schegg, Jérémie Dequidt, Eulalie Coevoet, Edouard Leurent, Rémi Sabatier, Philippe Preux, Christian Duriez
- article
- Robosoft 2022 - International Conference on Soft Robotics, Apr 2022, Edimbourg, United Kingdom
- Accès au texte intégral et bibtex
-

Theses
-
- titre
- An optimal control formulation for organ registration in augmented surgery
- auteur
- Guillaume Mestdagh
- article
- Optimization and Control [math.OC]. Université de Strasbourg, 2022. English. ⟨NNT : 2022STRAD014⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Modeling of soft robots made of anisotropic mesostructured materials
- auteur
- Félix Vanneste
- article
- Modeling and Simulation. Université de Lille 1, Sciences et Technologies; CRIStAL UMR 9189, 2022. English. ⟨NNT : ⟩
- Accès au texte intégral et bibtex
-

Preprints, Working Papers, ...
- titre
- Model-Based Disturbance Estimation for a Fiber-Reinforced Soft Manipulator using Orientation Sensing
- auteur
- Barnabas Gavin Cangan, Stefan Escaida Navarro, Bai Yang, Yu Zhang, Christian Duriez, Robert K. Katzschmann
- article
- 2022
- Accès au bibtex
-
2021
Journal articles
-
- titre
- Coupling numerical deformable models in global and reduced coordinates for the simulation of the direct and the inverse kinematics of Soft Robots
- auteur
- Yinoussa Adagolodjo, Federico Renda, Christian Duriez, Yinoussa Adagolodjo
- article
- IEEE Robotics and Automation Letters, 2021, IEEE Robotics and Automation Letters, 6 (2), pp.3910-3917. ⟨10.1109/LRA.2021.3061977⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Real-Time Simulation For Control Of Soft Robots With Self-Collisions Using Model Order Reduction For Contact Forces
- auteur
- Olivier Goury, Bruno Carrez, Christian Duriez
- article
- IEEE Robotics and Automation Letters, 2021, 6 (2), pp.3752 - 3759. ⟨10.1109/LRA.2021.3064247⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Trajectory Tracking Control Design for Large-Scale Linear Dynamical Systems With Applications to Soft Robotics
- auteur
- Maxime Thieffry, Alexandre Kruszewski, Thierry-Marie Guerra, Christian Duriez
- article
- IEEE Transactions on Control Systems Technology, 2021, 29 (2), pp.556-566. ⟨10.1109/TCST.2019.2953624⟩
- Accès au texte intégral et bibtex
-

-
- titre
- On the use of simulation in robotics: Opportunities, challenges, and suggestions for moving forward
- auteur
- Heesun Choi, Cindy Crump, Christian Duriez, Asher Elmquist, Gregory Hager, David Han, Frank Hearl, Jessica Hodgins, Abhinandan Jain, Frederick Leve, Chen Li, Franziska Meier, Dan Negrut, Ludovic Righetti, Alberto Rodriguez, Jie Tan, Jeff Trinkle
- article
- Proceedings of the National Academy of Sciences of the United States of America, 2021, 118 (1), ⟨10.1073/pnas.1907856118⟩
- Accès au texte intégral et bibtex
-

-
- titre
- A Bio-Inspired Active Prostate Phantom for Adaptive Interventions
- auteur
- Stefan Escaida Navarro, Singh Dhaliwal, Mario Sanz Lopez, Sarah Wilby, Antony Palmer, Wojciech Polak, Rochdi Merzouki, Christian Duriez
- article
- IEEE Transactions on Medical Robotics and Bionics, In press, ⟨10.1109/TMRB.2021.3123385⟩
- Accès au texte intégral et bibtex
-

- titre
- FEM-based Gain-Scheduling Control of a Soft Trunk Robot
- auteur
- Ke Wu, Gang Zheng
- article
- IEEE Robotics and Automation Letters, 2021, 6 (2), pp.3081 - 3088. ⟨10.1109/LRA.2021.3061311⟩
- Accès au bibtex
-
-
- titre
- Data-Driven Intra-Operative Estimation of Anatomical Attachments for Autonomous Tissue Dissection
- auteur
- Eleonora Tagliabue, Diego Dall'Alba, Micha Pfeiffer, Marco Piccinelli, Riccardo Marin, Umberto Castellani, Stefanie Speidel, Paolo Fiorini
- article
- IEEE Robotics and Automation Letters, 2021, 6, pp.1856 - 1863. ⟨10.1109/lra.2021.3060655⟩
- Accès au texte intégral et bibtex
-

Conference papers
-
- titre
- Turning an Articulated 3-PPSR Manipulator into a Parallel Continuum Robot
- auteur
- Oscar Gallardo, Benjamin Mauze, Redwan Dahmouche, Christian Duriez, Guillaume Laurent
- article
- IROS 2021 - IEEE/RSJ International Conference on Intelligent Robots and Systems, Sep 2021, Prague, Czech Republic. ⟨10.1109/IROS51168.2021.9636596⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Intra-operative Update of Boundary Conditions for Patient-specific Surgical Simulation
- auteur
- Eleonora Tagliabue, Marco Piccinelli, Diego Dall'Alba, Juan Verde, Micha Pfeiffer, Riccardo Marin, Stefanie Speidel, Paolo Fiorini, Stéphane Cotin
- article
- MICCAI 2021 - 24th International Conference on Medical Image Computing and Computer Assisted Intervention, Sep 2021, Strasbourg, France. pp.373-382
- Accès au texte intégral et bibtex
-

-
- titre
- Personal-by-design: a 3D Electromechanical Model of the Heart Tailored for Personalisation
- auteur
- Gaëtan Desrues, Delphine Feuerstein, Thierry Legay, Serge Cazeau, Maxime Sermesant
- article
- FIMH 2021 - 11th International Conference on Functional Imaging and Modeling of the Heart, Jun 2021, Stanford, CA, United States. ⟨10.1007/978-3-030-78710-3_43⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Robotic needle steering in deformable tissues with extreme learning machines
- auteur
- Pedro Henrique Suruagy Perrusi, Anna Cazzaniga, Paul Baksic, Eleonora Tagliabue, Elena de Momi, Hadrien Courtecuisse
- article
- AUTOMED 2021 - Automation in Medical Engineering, Jun 2021, Basel, Switzerland
- Accès au texte intégral et bibtex
-

-
- titre
- Learning robotic needle steering from inverse finite element simulations
- auteur
- Pedro Henrique Suruagy Perrusi, Anna Cazzaniga, Paul Baksic, Eleonora Tagliabue, Elena de Momi, Hadrien Courtecuisse
- article
- ICRA 2021 - Workshop on Representing and Manipulating Deformable Objects, May 2021, Xi’an / Virtual, China
- Accès au texte intégral et bibtex
-

-
- titre
- Shared control strategy for needle insertion into deformable tissue using inverse Finite Element simulation
- auteur
- Paul Baksic, Hadrien Courtecuisse, Bernard Bayle
- article
- ICRA 2021 - IEEE International Conference on Robotics and Automation, May 2021, Xi’an / Virtual, China
- Accès au texte intégral et bibtex
-

-
- titre
- Interactive Finite Element model of needle insertion and laceration
- auteur
- Pedro Henrique Suruagy Perrusi, Paul Baksic, Hadrien Courtecuisse
- article
- Eurographics 2021 - The 42nd Annual Conference of the European Association for Computer Graphics, European Association for Computer Graphics, May 2021, Vienne / Virtual, Austria. ⟨10.2312/egs.20211020⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Enabling the control of a new degree of freedom by using anisotropic material on a 6-DOF parallel soft robot
- auteur
- Félix Vanneste, Olivier Goury, Christian Duriez
- article
- Robosoft 2021, Apr 2021, Yale / Virtual, United States
- Accès au texte intégral et bibtex
-

Poster communications
-
- titre
- CoBra robot for localized cancer treatment and diagnosis under real-time MRI guidance
- auteur
- Sepaldeep Singh Dhaliwal, Sarah Wilby, Martijn de Vries, Kévin Brou Boni, Sina Firouzy, Stefan Escaida Navarro, Abdelkader Belarouci, Vincent Coelen, Othman Lakhal, David Pasquier, Antony L Palmer, Wojciech Polak, Dylan Jones, Ashraf Labib, John J Dobbelsteen, Mario Sanz Lopez, Christian Duriez, Nick Reynaert, Rochdi Merzouki
- article
- The Hamlyn Symposium on Medical Robotics Imperial College London, Jun 2021, London, United Kingdom
- Accès au texte intégral et bibtex
-

2020
Journal articles
-
- titre
- Predicted Microscopic Cortical Brain Images for Optimal Craniotomy Positioning and Visualization
- auteur
- Nazim Haouchine, Pariskhit Juvekar, Alexandra Golby, Sarah Frisken
- article
- Computer Methods in Biomechanics and Biomedical Engineering: Imaging & Visualization, 2020, ⟨10.1080/21681163.2020.1834874⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Three‐dimensional physics‐based registration of pelvic system using 2D dynamic magnetic resonance imaging slices
- auteur
- Hadrien Courtecuisse, Zhifan Jiang, Olivier Mayeur, Jean-Francois Witz, Pauline Lecomte-Grosbras, Michel Cosson, Mathias Brieu, Stéphane Cotin
- article
- Strain, 2020, 56 (3), ⟨10.1111/str.12339⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Estimation of boundary conditions for patient-specific liver simulation during augmented surgery
- auteur
- Sergei Nikolaev, Stéphane Cotin
- article
- International Journal of Computer Assisted Radiology and Surgery, 2020, 15 (7), pp.1107-1115. ⟨10.1007/s11548-020-02188-x⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Robust control of a silicone soft robot using neural networks
- auteur
- Gang Zheng, Yuan Zhou, Mingda Ju
- article
- ISA Transactions, 2020, 100, pp.38-45. ⟨10.1016/j.isatra.2019.12.004⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Constrained Stochastic State Estimation of Deformable 1D Objects: Application to Single-view 3D Reconstruction of Catheters with Radio-opaque Markers
- auteur
- Raffaella Trivisonne, Erwan Kerrien, Stéphane Cotin
- article
- Computerized Medical Imaging and Graphics, 2020, 81, ⟨10.1016/j.compmedimag.2020.101702⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Anisotropic soft robots based on 3D printed meso-structured materials: design, modeling by homogenization and simulation
- auteur
- Félix Vanneste, Olivier Goury, Jonas Martinez, Sylvain Lefebvre, Hervé Delingette, Christian Duriez
- article
- IEEE Robotics and Automation Letters, 2020, 5 (2), pp.2380-2386. ⟨10.1109/LRA.2020.2969926⟩
- Accès au texte intégral et bibtex
-

- titre
- Augmented Reality during Open Liver Surgery Using a Markerless Non-rigid Registration System
- auteur
- Nicolas Golse, Antoine Petit, Maïté Lewin, Eric Vibert, Stéphane Cotin
- article
- Journal of Gastrointestinal Surgery, 2020, ⟨10.1007/s11605-020-04519-4⟩
- Accès au bibtex
-
-
- titre
- Elastic registration based on compliance analysis and biomechanical graph matching
- auteur
- Jaime Garcia Guevara, Igor Peterlik, Marie-Odile Berger, Stéphane Cotin
- article
- Annals of Biomedical Engineering, 2020, 48, pp.447-462. ⟨10.1007/s10439-019-02364-4⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Automatic Shape Control of Deformable Wires based on Model-Free Visual Servoing
- auteur
- Romain Lagneau, Alexandre Krupa, Maud Marchal
- article
- IEEE Robotics and Automation Letters, 2020, 5 (4), pp.5252 - 5259. ⟨10.1109/LRA.2020.3007114⟩
- Accès au texte intégral et bibtex
-

-
- titre
- A Model-based Sensor Fusion Approach for Force and Shape Estimation in Soft Robotics
- auteur
- Stefan Escaida Navarro, Björn Hein, Stefan Escaida Navarro, Steven Nagels, Hosam Alagi, Lisa-Marie Faller, Olivier Goury, Thor Morales Bieze, Hubert Zangl, Bjorn Hein, Raf Ramakers, Wim Deferme, Gang Zheng, Christian Duriez
- article
- IEEE Robotics and Automation Letters, 2020, 5 (4), pp.5621-5628. ⟨10.1109/LRA.2020.3008120⟩
- Accès au texte intégral et bibtex
-

Conference papers
-
- titre
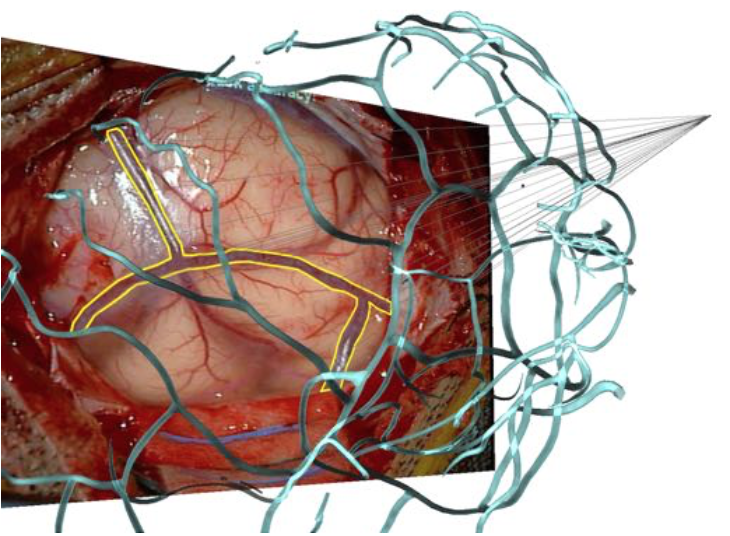
- Deformation Aware Augmented Reality for Craniotomy using 3D/2D Non-rigid Registration of Cortical Vessels
- auteur
- Nazim Haouchine, Parikshit Juvekar, William M Wells Iii, Stéphane Cotin, Alexandra Golby, Sarah Frisken
- article
- Medical Image Computing and Computer Assisted Intervention, Oct 2020, Lima, Peru. pp.735--744
- Accès au texte intégral et bibtex
-

-
- titre
- Use of stereo-laparoscopic liver surface reconstruction to compensate for pneumoperitoneum deformation through biomechanical modeling.
- auteur
- Andrea Teatini, Jean-Nicolas Brunet, Sergei Nikolaev, Bjørn Edwin, Stéphane Cotin, Ole Jakob Elle
- article
- VPH2020 - Virtual Physiological Human, Aug 2020, Paris, France
- Accès au texte intégral et bibtex
-

-
- titre
- LPV Framework for Non-Linear Dynamic Control of Soft Robots using Finite Element Model
- auteur
- Maxime Thieffry, Alexandre Kruszewski, Thierry-Marie Guerra, Christian Duriez
- article
- IFAC 2020 - 21rst IFAC World Congress, Jul 2020, Berlin, Germany
- Accès au texte intégral et bibtex
-

-
- titre
- Estimation of boundary conditions for patient-specific liver simulation during augmented surgery
- auteur
- Sergei Nikolaev, Stéphane Cotin
- article
- IPCAI 2020 - The 11th International Conference on Information Processing in Computer-Assisted Interventions, Jun 2020, Munich, Germany. pp.1107-1115, ⟨10.1007/s11548-020-02188-x⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Simultaneous Tracking and Elasticity Parameter Estimation of Deformable Objects
- auteur
- Agniva Sengupta, Romain Lagneau, Alexandre Krupa, Eric Marchand, Maud Marchal
- article
- ICRA 2020 - IEEE International Conference on Robotics and Automation, May 2020, Paris, France. pp.1-7
- Accès au texte intégral et bibtex
-

-
- titre
- Robotic needle insertion in moving soft tissues using constraint-based inverse Finite Element simulation
- auteur
- Paul Baksic, Hadrien Courtecuisse, Christian Duriez, Bernard Bayle
- article
- ICRA 2020 - IEEE International Conference on Robotics and Automation, May 2020, Paris / Virtual, France. pp.2407-2413, ⟨10.1109/ICRA40945.2020.9197515⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Active Deformation through Visual Servoing of Soft Objects
- auteur
- Romain Lagneau, Alexandre Krupa, Maud Marchal
- article
- ICRA 2020 - IEEE International Conference on Robotics and Automation, May 2020, Paris, France. pp.1-7
- Accès au texte intégral et bibtex
-

-
- titre
- Alignment of Cortical Vessels viewed through the Surgical Microscope with Preoperative Imaging to Compensate for Brain Shift
- auteur
- Nazim Haouchine, Parikshit Juvekar, Alexandra Golby, William M Wells, Stéphane Cotin, Sarah Frisken
- article
- Medical Imaging 2020: Image-Guided Procedures, Robotic Interventions, and Modeling, Feb 2020, Houston, United States
- Accès au texte intégral et bibtex
-
Book sections
-
- titre
- Data-driven simulation for augmented surgery
- auteur
- Andrea Mendizabal, Eleonora Tagliabue, Tristan Hoellinger, Jean-Nicolas Brunet, Sergei Nikolaev, Stéphane Cotin
- article
- Bilen Emek Abali; Ivan Giorgio. Developments and Novel Approaches in Biomechanics and Metamaterials, 132, Springer, pp.71-96, 2020, Advanced Structured Materials, 978-3-030-50464-9. ⟨10.1007/978-3-030-50464-9_5⟩
- Accès au texte intégral et bibtex
-

Master thesis
-
- titre
- Advances in the inverse biomechanical simulation framework for autonomous robotic needle steering.
- auteur
- Pedro Henrique Suruagy Perrusi
- article
- Automatic Control Engineering. 2020
- Accès au texte intégral et bibtex
-

Theses
-
- titre
- Machine Learning meets real-time Numerical Simulation - Application to surgical training, preoperative planning and surgical assistance
- auteur
- Andrea Mendizabal
- article
- Biomechanics [physics.med-ph]. Université de Strasbourg, 2020. English. ⟨NNT : 2020STRAD034⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Exploring new numerical methods for the simulation of soft tissue deformations in surgery assistance
- auteur
- Jean-Nicolas Brunet
- article
- Bioinformatics [q-bio.QM]. Université de Strasbourg, 2020. English. ⟨NNT : 2020STRAD029⟩
- Accès au texte intégral et bibtex
-

2019
Journal articles
-
- titre
- Force classification during robotic interventions through simulation-trained neural networks
- auteur
- Andrea Mendizabal, Raphael Sznitman, Stéphane Cotin
- article
- International Journal of Computer Assisted Radiology and Surgery, 2019, 14, pp.1601-1610. ⟨10.1007/s11548-019-02048-3⟩
- Accès au texte intégral et bibtex
-

- titre
- Soft Haptic Device to Render the Sensation of Flying Like a Drone
- auteur
- Carine Rognon, Margaret Koehler, Christian Duriez, Dario Floreano, Allison M Okamura
- article
- IEEE Robotics and Automation Letters, 2019, 4 (3), pp.2524-2531. ⟨10.1109/LRA.2019.2907432⟩
- Accès au bibtex
-
-
- titre
- Stiffness Control of Deformable Robots Using Finite Element Modeling
- auteur
- Margaret Koehler, Allison M Okamura, Christian Duriez
- article
- IEEE Robotics and Automation Letters, 2019, 4 (2), pp.469-476. ⟨10.1109/LRA.2019.2890897⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Robotic Insertion of Flexible Needle in Deformable Structures Using Inverse Finite-Element Simulation
- auteur
- Yinoussa Adagolodjo, Laurent Goffin, Michel de Mathelin, Hadrien Courtecuisse
- article
- IEEE Transactions on Robotics, 2019, 35 (3), pp.697-708. ⟨10.1109/TRO.2019.2897858⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Calibration and External Force Sensing for Soft Robots using an RGB-D Camera
- auteur
- Zhongkai Zhang, Antoine Petit, Jeremie Dequidt, Christian Duriez
- article
- IEEE Robotics and Automation Letters, 2019, 4 (3), pp.2356 - 2363. ⟨10.1109/LRA.2019.2903356⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Population-based priors in cardiac model personalisation for consistent parameter estimation in heterogeneous databases
- auteur
- Roch Molléro, Xavier Pennec, Hervé Delingette, Nicholas Ayache, Maxime Sermesant
- article
- International Journal for Numerical Methods in Biomedical Engineering, 2019, 35 (2), pp.e3158. ⟨10.1002/cnm.3158⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Motion Control of Cable-Driven Continuum Catheter Robot through Contacts
- auteur
- Zhongkai Zhang, Jeremie Dequidt, Junghwan Back, Hongbin Liu, Christian Duriez
- article
- IEEE Robotics and Automation Letters, 2019, 4 (2), pp.1852-1859. ⟨10.1109/LRA.2019.2898047⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Virtual image correlation of magnetic resonance images for 3D geometric modelling of pelvic organs
- auteur
- Zhifan Jiang, Olivier Mayeur, Jean-Francois Witz, Pauline Lecomte‐grosbras, Jérémie Dequidt, Michel Cosson, Christian Duriez, Mathias Brieu
- article
- Strain, 2019, 55 (3), pp.e12305. ⟨10.1111/str.12305⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Control Design for Soft Robots based on Reduced Order Model
- auteur
- Maxime Thieffry, Alexandre Kruszewski, Christian Duriez, Thierry-Marie Guerra
- article
- IEEE Robotics and Automation Letters, 2019, 4 (1), pp.25-32. ⟨10.1109/LRA.2018.2876734⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Finite-time estimation for linear time-delay systems via homogeneous method
- auteur
- Gang Zheng, Haoping Wang
- article
- International Journal of Control, 2019, 92 (6), pp.1252-1263. ⟨10.1080/00207179.2017.1390255⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Modeling Novel Soft Mechanosensors based on Air-Flow Measurements
- auteur
- Stefan Escaida Navarro, Olivier Goury, Gang Zheng, Thor Morales Bieze, Christian Duriez
- article
- IEEE Robotics and Automation Letters, 2019, 4 (4), pp.4338 - 4345. ⟨10.1109/LRA.2019.2932604⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Position-based modeling of lesion displacement in Ultrasound-guided breast biopsy
- auteur
- Eleonora Tagliabue, Diego Dall’alba, Enrico Magnabosco, Chiara Tenga, Igor Peterlík, Paolo Fiorini
- article
- International Journal of Computer Assisted Radiology and Surgery, 2019, 14 (8), pp.1329-1339. ⟨10.1007/s11548-019-01997-z⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Simulation of hyperelastic materials in real-time using deep learning
- auteur
- Andrea Mendizabal, Pablo Márquez-Neila, Stéphane Cotin
- article
- Medical Image Analysis, 2019, 59, pp.101569. ⟨10.1016/j.media.2019.101569⟩
- Accès au texte intégral et bibtex
-

Conference papers
-
- titre
- Time stepping scheme for interactive medical simulations
- auteur
- François Jourdes
- article
- SWS19 - SOFA Week Symposium, Nov 2019, Paris, France
- Accès au texte intégral et bibtex
-

-
- titre
- An Interactive Physically-based Model for Active Suction Phenomenon Simulation
- auteur
- Antonin Bernardin, Christian Duriez, Maud Marchal
- article
- SWS19 - SOFA Week Symposium, Nov 2019, Paris, France
- Accès au texte intégral et bibtex
-

-
- titre
- OpenVolumeMesh -A Versatile Index-Based Data Structure for 3D Polytopal Complexes
- auteur
- Waseem Palliyali, Georges Younes, Julien Abinahed, Nikhil Navkar, Shidin Balakrishnan, Abdulrahman Alfayyad, Abdulla Al-Ansari, Zherong Pan, Gorune Ohannessian, Samer Itani, Dinesh Manocha, George Turkiyyah
- article
- SWS19 - SOFA Week Symposium, Nov 2019, Paris, France
- Accès au texte intégral et bibtex
-

-
- titre
- Towards using SOFA to train a controller for neurovascular catheter interventions
- auteur
- Tim P Pusch, Lennart Karstensen, Tobias Behr
- article
- SWS19 - SOFA Week Symposium, Nov 2019, Paris, France
- Accès au texte intégral et bibtex
-

-
- titre
- Biomechanical modeling of probe to tissue interaction in robotic ultrasound scanning
- auteur
- Eleonora Tagliabue, Diego Dall'Alba, Paolo Fiorini
- article
- SWS19 - SOFA Week Symposium, Nov 2019, Paris, France
- Accès au texte intégral et bibtex
-

-
- titre
- Towards Hyper-Reduction of Cardiac Models using Poly-Affine Deformation
- auteur
- Gaëtan Desrues, Hervé Delingette, Maxime Sermesant
- article
- STACOM 2019: Statistical Atlases and Computational Models of the Heart, Oct 2019, Shenzhen, China
- Accès au texte intégral et bibtex
-

-
- titre
- Physics-based Deep Neural Network for Augmented Reality during Liver Surgery
- auteur
- Jean-Nicolas Brunet, Andrea Mendizabal, Antoine Petit, Nicolas Golse, Eric Vibert, Stéphane Cotin
- article
- MICCAI 2019 - 22nd International Conference on Medical Image Computing and Computer Assisted Intervention, Oct 2019, Shenzhen, China. pp.8, ⟨10.1007/978-3-030-32254-0_16⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Physics-based Deep Neural Network for Real-Time Lesion Tracking in Ultrasound-guided Breast Biopsy
- auteur
- Andrea Mendizabal, Eleonora Tagliabue, Jean-Nicolas Brunet, Diego Dall'Alba, Paolo Fiorini, Stéphane Cotin
- article
- Computational Biomechanics for Medicine XIV, Oct 2019, Shenzhen, China
- Accès au texte intégral et bibtex
-

-
- titre
- Deformed Reality
- auteur
- Antoine Petit, Nazim Haouchine, Frédérick Roy, Dan B Goldman, Stéphane Cotin
- article
- Computer Graphics & Visual Computing (Eurographics), Sep 2019, Bangor, United Kingdom
- Accès au texte intégral et bibtex
-

-
- titre
- The effect of discretization on parameter identification. Application to patient-specific simulations
- auteur
- Nava Weingort Schulmann, Stéphane Cotin, Igor Peterlík
- article
- CMBBE 2019 - 16th International Symposium on Computer Methods in Biomechanics and Biomedical Engineering, Aug 2019, New York (NY), United States
- Accès au texte intégral et bibtex
-

-
- titre
- Corotated meshless implicit dynamics for deformable bodies
- auteur
- Jean-Nicolas Brunet, Vincent Magnoux, Benoît Ozell, Stéphane Cotin
- article
- WSCG 2019 - 27th International Conference on Computer Graphics, Visualization and Computer Vision, May 2019, Pilsen, Czech Republic. ⟨10.24132/CSRN.2019.2901.1.11⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Controllability pre-verification of silicone soft robots based on finite-element method
- auteur
- Gang Zheng, Olivier Goury, Maxime Thieffry, Alexandre Kruszewski, Christian Duriez
- article
- ICRA 2019 - International Conference on Robotics and Automation, May 2019, Montreal, Canada. pp.7395-7400, ⟨10.1109/ICRA.2019.8794370⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Dynamically Closed-Loop Controlled Soft Robotic Arm using a Reduced Order Finite Element Model with State Observer
- auteur
- Robert K Katzschmann, Maxime Thieffry, Olivier Goury, Alexandre Kruszewski, Thierry-Marie Guerra, Christian Duriez, Daniela Rus
- article
- IEEE 2019 International Conference on Soft Robotics, Apr 2019, Séoul, South Korea. pp.717-724
- Accès au texte intégral et bibtex
-

-
- titre
- Soft robots locomotion and manipulation control using FEM simulation and quadratic programming
- auteur
- Eulalie Coevoet, Adrien Escande, Christian Duriez
- article
- RoboSoft 2019 - IEEE International Conference on Soft Robotics, Apr 2019, Seoul, South Korea. ⟨10.1109/ROBOSOFT.2019.8722815⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Toward Shape Optimization of Soft Robots
- auteur
- Thomas Morzadec, Damien Marchal, Christian Duriez
- article
- RoboSoft 2019 - IEEE International Conference on Soft Robotics, Apr 2019, Séoul, South Korea
- Accès au texte intégral et bibtex
-

-
- titre
- FEM-based confidence assessment of non-rigid registration
- auteur
- Paul Baksic, Hadrien Courtecuisse, Matthieu Chabanas, Bernard Bayle
- article
- Surgetica 2019, 2019, Rennes, France
- Accès au texte intégral et bibtex
-

Book sections
-
- titre
- Computational Biomechanics of the Brain in the Operating Theatre
- auteur
- Hadrien Courtecuisse, Fanny Morin, Ingerid Reinertsen, Yohan Payan, Matthieu Chabanas
- article
- Biomechanics of the Brain, Springer, pp.321-344, 2019, 978-3-030-04995-9. ⟨10.1007/978-3-030-04996-6_13⟩
- Accès au texte intégral et bibtex
-

Poster communications
-
- titre
- Robust Fabrication of a Soft Mechanosensor based on Pneumatic Measurements
- auteur
- Stefan Escaida Navarro, Olivier Goury, Gang Zheng, Thor Morales Bieze, Christian Duriez
- article
- New Advances in Tactile Sensation, Perception, and Learning in Robotics: Emerging Materials and Technologies for Manipulation (RoboTac 2019), Nov 2019, Macao, China
- Accès au texte intégral et bibtex
-

Proceedings
-
- titre
- Simulation of soft tissue deformation in real-time using domain decomposition
- auteur
- Ryadh Haferssas, Pierre-Henri Tournier, Frédéric Nataf, Stéphane Cotin
- article
- MICCAI (Workshop on Computational Biomechanics for Medicine), 2019
- Accès au texte intégral et bibtex
-

Theses
-
- titre
- Biomechanical graph matching for hepatic intra-operative image registration
- auteur
- Jaime Garcia Guevara
- article
- Computer Vision and Pattern Recognition [cs.CV]. Universite de Lorraine, 2019. English. ⟨NNT : 2019LORR0238⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Model-Based Dynamic Control of Soft Robots
- auteur
- Maxime Thieffry
- article
- Automatic. Université Polytechnique des Hauts-de-France, 2019. English. ⟨NNT : ⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Vision-based calibration, position control and force sensing for soft robots
- auteur
- Zhongkai Zhang
- article
- Robotics [cs.RO]. Université de Lille, 2019. English. ⟨NNT : ⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Optimization-based inverse model of soft robots, with contact handling
- auteur
- Eulalie Coevoet
- article
- Automatic. Université de Lille 1, Sciences et Technologies, 2019. English. ⟨NNT : ⟩
- Accès au texte intégral et bibtex
-

Preprints, Working Papers, ...
-
- titre
- Constrained Stochastic State Estimation for 3D Shape Reconstruction of Catheters and Guidewires in Fluoroscopic Images
- auteur
- Raffaella Trivisonne, Erwan Kerrien, Stéphane Cotin
- article
- 2019
- Accès au texte intégral et bibtex
-

2018
Journal articles
-
- titre
- Corotational cut finite element method for real-time surgical simulation: Application to needle insertion simulation
- auteur
- Huu Phuoc Bui, Satyendra Tomar, Stéphane Pierre Alain Bordas
- article
- Computer Methods in Applied Mechanics and Engineering, 2018, ⟨10.1016/j.cma.2018.10.023⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Calipso: Physics-based Image and Video Editing through CAD Model Proxies
- auteur
- Nazim Haouchine, Frédérick Roy, Hadrien Courtecuisse, Matthias Niessner, Stéphane Cotin
- article
- The Visual Computer, 2018, 36, pp.211-226. ⟨10.1007/s00371-018-1600-0⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Nonprehensile Manipulation of Deformable Objects: Achievements and Perspectives from the RobDyMan Project
- auteur
- Fabio Ruggiero, Antoine Petit, Diana Serra, Aykut C Satici, Jonathan Cacace, Alejandro Donaire, Fanny Ficuciello, Luca R Buonocore, Giuseppe Andrea Fontanelli, Vincenzo Lippiello, Luigi Villani, Bruno Siciliano
- article
- IEEE Robotics and Automation Magazine, 2018, 25 (3), pp.83 - 92. ⟨10.1109/mra.2017.2781306⟩
- Accès au texte intégral et bibtex
-

-
- titre
- FiloGen: A Model-Based Generator of Synthetic 3D Time-Lapse Sequences of Single Motile Cells with Growing and Branching Filopodia
- auteur
- Dmitry V Sorokin, Igor Peterlik, Vladimír V Ulman, David Svoboda, Tereza Nečasová, Katsiarina Morgaenko, Lívia Eisellová, Lenka Tesařová, Martin Maška
- article
- IEEE Transactions on Medical Imaging, 2018, pp.1-12. ⟨10.1109/TMI.2018.2845884⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Biomechanics-based graph matching for augmented CT-CBCT
- auteur
- Jaime Garcia Guevara, Igor Peterlik, Marie-Odile Berger, Stephane Cotin
- article
- International Journal of Computer Assisted Radiology and Surgery, 2018, 13 (6), pp.805-813. ⟨10.1007/s11548-018-1755-1⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Fast Elastic Registration of Soft Tissues under Large Deformations
- auteur
- Igor Peterlik, Hadrien Courtecuisse, Robert Rohling, Purang Abolmaesumi, Christopher Nguan, Stéphane Cotin, Septimiu E Salcudean
- article
- Medical Image Analysis, 2018, 45, pp.24-40. ⟨10.1016/j.media.2017.12.006⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Model-based Feature Augmentation for Cardiac Ablation Target Learning from Images
- auteur
- Rocio Cabrera Lozoya, Benjamin Berte, Hubert Cochet, Pierre Jaïs, Nicholas Ayache, Maxime Sermesant
- article
- IEEE Transactions on Biomedical Engineering, 2018, pp.1. ⟨10.1109/TBME.2018.2818300⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Vision-based Force Feedback Estimation for Robot-assisted Surgery using Instrument-constrained Biomechanical 3D Maps
- auteur
- Nazim Haouchine, Winnie Kuang, Stéphane Cotin, Michael Yip
- article
- IEEE Robotics and Automation Letters, 2018, ⟨10.1109/LRA.2018.2810948⟩
- Accès au texte intégral et bibtex
-
-
- titre
- Vision-Based Sensing of External Forces Acting on Soft Robots Using Finite Element Method
- auteur
- Zhongkai Zhang, Jérémie Dequidt, Christian Duriez
- article
- IEEE Robotics and Automation Letters, 2018, 3 (3), pp.1529 - 1536. ⟨10.1109/LRA.2018.2800781⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Intraoperative Biomechanical Registration of the Liver: Does the Heterogeneity of the Liver Matter?
- auteur
- Rosalie Plantefève, Igor Peterlik, Stéphane Cotin
- article
- Innovation and Research in BioMedical engineering, 2018, 39 (1), pp.18-25. ⟨10.1016/j.irbm.2017.10.005⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Finite element method-based kinematics and closed-loop control of soft, continuum manipulators
- auteur
- Thor Morales Bieze, Frederick Largilliere, Alexandre Kruszewski, Zhongkai Zhang, Rochdi Merzouki, Christian Duriez
- article
- Soft Robotics, 2018, 5 (3), pp.348-364. ⟨10.1089/soro.2017.0079⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Transfer Learning from Simulations on a Reference Anatomy for ECGI in Personalised Cardiac Resynchronization Therapy
- auteur
- Sophie Giffard-Roisin, Hervé Delingette, Thomas Jackson, Jessica Webb, Lauren Fovargue, Jack Lee, Christopher A Rinaldi, Reza Razavi, Nicholas Ayache, Maxime Sermesant
- article
- IEEE Transactions on Biomedical Engineering, In press, 20, ⟨10.1109/TBME.2018.2839713⟩
- Accès au texte intégral et bibtex
-

-
- titre
- A Framework for the Generation of Realistic Synthetic Cardiac Ultrasound and Magnetic Resonance Imaging Sequences from the same Virtual Patients
- auteur
- Yitian Zhou, Sophie Giffard-Roisin, Mathieu de Craene, Sorina Camarasu-Pop, Jan d'Hooge, Martino Alessandrini, Denis Friboulet, Maxime Sermesant, Olivier Bernard
- article
- IEEE Transactions on Medical Imaging, 2018, 37 (3), pp.741-754. ⟨10.1109/TMI.2017.2708159⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Fast, generic and reliable control and simulation of soft robots using model order reduction
- auteur
- Olivier Goury, Christian Duriez
- article
- IEEE Transactions on Robotics, 2018, 34 (6), pp.1565 - 1576. ⟨10.1109/TRO.2018.2861900⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Model-based generation of large databases of cardiac images: synthesis of pathological cine MR sequences from real healthy cases
- auteur
- Nicolas Duchateau, Maxime Sermesant, Hervé Delingette, Nicholas Ayache
- article
- IEEE Transactions on Medical Imaging, 2018, 37, pp.755-766. ⟨10.1109/TMI.2017.2714343⟩
- Accès au texte intégral et bibtex
-

Conference papers
-
- titre
- Environment-aware non-rigid registration in surgery using physics-based simulation
- auteur
- Antoine Petit, Stéphane Cotin
- article
- ACCV 2018 - 14th Asian Conference on Computer Vision, Dec 2018, Perth, Australia
- Accès au texte intégral et bibtex
-

-
- titre
- Capturing Deformations of Interacting Non-rigid Objects Using RGB-D Data
- auteur
- Antoine Petit, Stéphane Cotin, Vincenzo Lippiello, Bruno Siciliano
- article
- IROS 2018 - IEEE/RSJ International Conference on Intelligent Robots and Systems, Oct 2018, Madrid, Spain
- Accès au texte intégral et bibtex
-

-
- titre
- FEM-based Deformation Control for Dexterous Manipulation of 3D Soft Objects
- auteur
- Fanny Ficuciello, Alessandro Migliozzi, Eulalie Coevoet, Antoine Petit, Christian Duriez
- article
- IROS 2018 - IEEE/RSJ International Conference on Intelligent Robots and Systems, Oct 2018, Madrid, Spain. ⟨10.1109/IROS.2018.8593512⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Stochastic Correction of Boundary Conditions during Liver Surgery
- auteur
- Sergei Nikolaev, Igor Peterlik, Stéphane Cotin
- article
- CVCS 2018 - 9th Colour and Visual Computing Symposium 2018, NTNU: Norwegian University of Science and Technology, Sep 2018, Gjovik, Norway. pp.1 - 4, ⟨10.1109/CVCS.2018.8496720⟩
- Accès au texte intégral et bibtex
-

- titre
- Real-time Patient Specific Surgical Simulation using Corotational Cut Finite Element Method: Application to Needle Insertion Simulation
- auteur
- Huu Phuoc Bui, Satyendra Tomar, Franz Chouly, Alexei Lozinski, Stéphane Bordas
- article
- 13th World Congress in Computational Mechanics, Jul 2018, New York, United States
- Accès au bibtex
-
-
- titre
- Biomechanics-based graph matching for augmented CT-CBCT
- auteur
- Jaime Garcia Guevara, Igor Peterlik, Marie-Odile Berger, Stephane Cotin
- article
- IPCAI 2018 - 9th International Conference on Information Processing in Computer-Assisted Interventions, Jun 2018, Berlin, Germany
- Accès au texte intégral et bibtex
-

-
- titre
- Reduced Order Control of Soft Robots with Guaranteed Stability
- auteur
- Maxime Thieffry, Alexandre Kruszewski, Thierry-Marie Guerra, Christian Duriez
- article
- European Control Conference ECC18, Jun 2018, Limassol, Cyprus
- Accès au texte intégral et bibtex
-

-
- titre
- Marker-based Registration for Large Deformations -Application to Open Liver Surgery
- auteur
- Yinoussa Adagolodjo, Nicolas Golse, Eric Vibert, Michel de Mathelin, Stéphane Cotin, Hadrien Courtecuisse, Yinoussa Adagolodjo
- article
- ICRA 2018 - International Conference on Robotics and Automation, May 2018, Brisbane, Australia
- Accès au texte intégral et bibtex
-

Poster communications
-
- titre
- How To Design Your Polymer Artificial Muscle Actuator/ Sensor?
- auteur
- Marwa A Eldiwiny, Eric Cattan, Christian Duriez
- article
- ICRA 2018 - IEEE International Conference on Robotics and Automation, May 2018, Brisbane, Australia. pp.1-2
- Accès au texte intégral et bibtex
-

Theses
-
- titre
- Coupling rObotics aNd mEdical simulations for automatiC percuTaneous procedures (CONECT)
- auteur
- Yinoussa Adagolodjo, Yinoussa Adagolodjo
- article
- Optimisation et contrôle [math.OC]. Université de Strasbourg, 2018. Français. ⟨NNT : ⟩
- Accès au texte intégral et bibtex
-

2017
Journal articles
-
- titre
- Controlling the error on target motion through real-time mesh adaptation: applications to Deep Brain Stimulation
- auteur
- Huu Phuoc Bui, Satyendra Tomar, Hadrien Courtecuisse, Michel Audette, Stéphane Cotin, Stéphane P A Bordas
- article
- International Journal for Numerical Methods in Biomedical Engineering, 2017, pp.1-26. ⟨10.1002/cnm.2958⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Non-Invasive Personalisation of a Cardiac Electrophysiology Model from Body Surface Potential Mapping
- auteur
- Sophie Giffard-Roisin, Thomas Jackson, Lauren Fovargue, Jack Lee, Hervé Delingette, Reza Razavi, Nicholas Ayache, Maxime Sermesant
- article
- IEEE Transactions on Biomedical Engineering, 2017, IEEE Transactions on Biomedical Engineering, 64 (9), pp.2206 - 2218. ⟨10.1109/TBME.2016.2629849⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Non-rigid Contour-Based Registration of Cell Nuclei in 2D Live Cell Microscopy Images Using a Dynamic Elasticity Model
- auteur
- Dmitry V Sorokin, Igor Peterlik, Marco Tektonidis, Karl Rohr, Pavel Matula
- article
- IEEE Transactions on Medical Imaging, 2017, 37 (1), pp.173-184. ⟨10.1109/TMI.2017.2734169⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Real-time Error Control for Surgical Simulation
- auteur
- Huu Phuoc Bui, Satyendra Tomar, Hadrien Courtecuisse, Stéphane Cotin, Stéphane Bordas
- article
- IEEE Transactions on Biomedical Engineering, 2017, 95 (3), pp.596-607. ⟨10.1109/TBME.2017.2695587⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Optimization-Based Inverse Model of Soft Robots With Contact Handling
- auteur
- Eulalie Coevoet, Adrien Escande, Christian Duriez
- article
- IEEE Robotics and Automation Letters, 2017, ⟨10.1109/LRA.2017.2669367⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Multiorgan Motion Tracking in Dynamic Magnetic Resonance Imaging for Evaluation of Pelvic System Mobility and Shear Strain
- auteur
- Zhifan Jiang, Jean-François Witz, Pauline Lecomte-Grosbras, Jeremie Dequidt, Stéphane Cotin, Christelle Rubod, Christian Duriez, Mathias Brieu
- article
- Strain, 2017, 53 (2), ⟨10.1111/str.12224⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Blood vessel modeling for interactive simulation of interventional neuroradiology procedures
- auteur
- Erwan Kerrien, Ahmed Yureidini, Jeremie Dequidt, Christian Duriez, René Anxionnat, Stéphane Cotin
- article
- Medical Image Analysis, 2017, 35, pp.685 - 698. ⟨10.1016/j.media.2016.10.003⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Brain-shift compensation using intraoperative ultrasound and constraint-based biomechanical simulation
- auteur
- Fanny Morin, Hadrien Courtecuisse, Ingerid Reinertsen, Florian Le Lann, Olivier Palombi, Yohan Payan, Matthieu Chabanas
- article
- Medical Image Analysis, 2017, 40, pp.133 - 153. ⟨10.1016/j.media.2017.06.003⟩
- Accès au texte intégral et bibtex
-

Conference papers
-
- titre
- Automatic biomechanical graph matching CT-CBCT fusion
- auteur
- Jaime Garcia Garcia Guevara, Igor Peterlik, Marie-Odile Berger, Stéphane Cotin
- article
- Surgetica 2017, Nov 2017, Strasbourg, France
- Accès au texte intégral et bibtex
-
-
- titre
- DejaVu: Intra-operative Simulation for Surgical Gesture Rehearsal
- auteur
- Nazim Haouchine, Danail Stoyanov, Frederick Roy, Stéphane Cotin
- article
- Medical Image Computing and Computer Assisted Interventions Conference MICCAI 2017, Oct 2017, Quebec City, Canada
- Accès au texte intégral et bibtex
-

-
- titre
- Silhouette-based Pose Estimation for Deformable Organs Application to Surgical Augmented Reality
- auteur
- Yinoussa Adagolodjo, Raffaella Trivisonne, Nazim Haouchine, Stéphane Cotin, Hadrien Courtecuisse, Yinoussa Adagolodjo
- article
- IROS 2017 - IEEE/RSJ International Conference on Intelligent Robots and Systems, Sep 2017, Vancouver, Canada
- Accès au texte intégral et bibtex
-

-
- titre
- Visual Servoing Control of Soft Robots based on Finite Element Model
- auteur
- Zhongkai Zhang, Thor Morales Bieze, Jérémie Dequidt, Alexandre Kruszewski, Christian Duriez
- article
- IROS 2017 - IEEE/RSJ International Conference on Intelligent Robots and Systems, Sep 2017, Vancouver, Canada
- Accès au texte intégral et bibtex
-

-
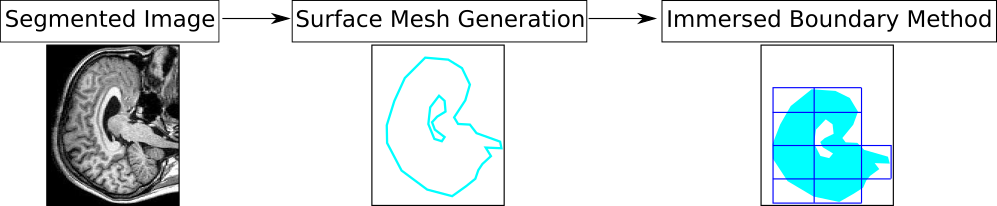
- titre
- An Immersed Boundary Method for Detail-Preserving Soft Tissue Simulation from Medical Images
- auteur
- Christoph J Paulus, Roland Maier, Daniel Peterseim, Stéphane Cotin
- article
- Computational Biomechanics for Medicine, Sep 2017, Quebec, Canada. pp.55-67, ⟨10.1007/978-3-319-75589-2_6⟩
- Accès au texte intégral et bibtex
-
-
- titre
- Longitudinal Analysis using Personalised 3D Cardiac Models with Population-Based Priors: Application to Paediatric Cardiomyopathies
- auteur
- Roch Molléro, Hervé Delingette, Manasi Datar, Tobias Heimann, Jakob Hauser, Dilveer Panesar, Alexander Jones, Andrew Taylor, Marcus Kelm, Titus Kuehne, Marcello Chinali, Gabriele Rinelli, Nicholas Ayache, Xavier Pennec, Maxime Sermesant
- article
- Medical Image Computing and Computer Assisted Intervention (MICCAI), Sep 2017, Québec City, Canada. pp.350-358, ⟨10.1007/978-3-319-66185-8_40⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Robust Automatic Graph-based Skeletonization of Hepatic Vascular Trees
- auteur
- Rosalie Plantefève, Samuel Kadoury, An Tang, Igor Peterlik
- article
- CIIV STENT 2017, Sep 2017, Québec, Canada
- Accès au texte intégral et bibtex
-

-
- titre
- Image-driven Stochastic Identification of Boundary Conditions for Predictive Simulation
- auteur
- Igor Peterlik, Nazim Haouchine, Lukáš Ručka, Stéphane Cotin
- article
- 20th International Conference on Medical Image Computing and Computer Assisted Intervention, Sep 2017, Québec, Canada
- Accès au texte intégral et bibtex
-

-
- titre
- Real-time Error Control for Surgical Simulation
- auteur
- Huu Phuoc Bui, Satyendra Tomar, Hadrien Courtecuisse, Stéphane Cotin, Stéphane P A Bordas
- article
- BIOMECHANICS AND COMPUTER ASSISTED SURGERY MEETS MEDICAL REALITY, Aug 2017, Lille, France
- Accès au texte intégral et bibtex
-

- titre
- Using Physical Modeling and RGB-D Registration for Contact Force Sensing on Deformable Objects
- auteur
- Antoine Petit, Fanny Ficuciello, Giuseppe Andrea Fontanelli, Luigi Villani, Bruno Siciliano
- article
- ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics, IEEE, Jul 2017, Madrid, Spain. pp.24-33, ⟨10.5220/0006415900240033⟩
- Accès au bibtex
-
-
- titre
- Template-based Monocular 3D Recovery of Elastic Shapes using Lagrangian Multipliers
- auteur
- Nazim Haouchine, Stéphane Cotin
- article
- Computer Vision and Pattern Recognition (CVPR), Jul 2017, Honolulu, Hawai, United States. ⟨10.1109/CVPR.2017.381⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Augmented 3D Catheter Navigation using Constrained Shape from Template
- auteur
- Raffaella Trivisonne, Erwan Kerrien, Stéphane Cotin
- article
- Hamlyn Symposium, Jun 2017, London, United Kingdom
- Accès au texte intégral et bibtex
-

- titre
- A Rule-Based Method to Model Myocardial Fiber Orientation for Simulating Ventricular Outflow Tract Arrhythmias
- auteur
- Rubén Doste, David Soto-Iglesias, Gabriel Bernardino, Rafael Sebastian, Sophie Giffard-Roisin, Rocío Cabrera-Lozoya, Maxime Sermesant, Antonio Berruezo, Damián Sánchez-Quintana, Oscar Camara
- article
- Functional imaging and modelling of the heart 2017, Jun 2017, Toronto, Canada. ⟨10.1007/978-3-319-59448-4_33⟩
- Accès au bibtex
-
-
- titre
- Sparse Bayesian Non-linear Regression for Multiple Onsets Estimation in Non-invasive Cardiac Electrophysiology
- auteur
- Sophie Giffard-Roisin, Hervé Delingette, Thomas Jackson, Lauren Fovargue, Jack Lee, Aldo Rinaldi, Nicholas Ayache, Reza Razavi, Maxime Sermesant
- article
- Functional imaging and modelling of the heart 2017, Jun 2017, Toronto, Canada. pp.230-238, ⟨10.1007/978-3-319-59448-4_22⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Smoothed Particle Hydrodynamics for Electrophysiological Modeling: An Alternative to Finite Element Methods
- auteur
- Eric Lluch, Rubén Doste, Sophie Giffard-Roisin, Alexandre This, Maxime Sermesant, Oscar Camara, Mathieu de Craene, Hernán G Morales
- article
- FIMH 2017 - 9th International Conference on Functional Imaging and Modelling of the Heart, Jun 2017, Toronto, Canada. pp.333-343, ⟨10.1007/978-3-319-59448-4_32⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Haptic Rendering of FEM-based Tearing Simulation using Clusterized Collision Detection
- auteur
- Benoît Le Gouis, François Lehericey, Maud Marchal, Bruno Arnaldi, Valérie Gouranton, Anatole Lécuyer
- article
- WHC 2017 - IEEE World Haptics Conference, Jun 2017, Munich, Germany. pp.406-411
- Accès au texte intégral et bibtex
-

-
- titre
- Real-time simulation of hydraulic components for interactive control of soft robots
- auteur
- Alejandro Rodríguez, Eulalie Coevoet, Christian Duriez
- article
- The 2017 IEEE International Conference on Robotics and Automation (ICRA), May 2017, Singapour, Singapore
- Accès au texte intégral et bibtex
-

-
- titre
- Elasticity-based Clustering for Haptic Interaction with Heterogeneous Deformable Objects
- auteur
- Benoît Le Gouis, Maud Marchal, Anatole Lécuyer, Bruno Arnaldi
- article
- VRIPHYS2017 - 13th Eurographics Workshop on Virtual Reality Interaction and Physical Simulation, Apr 2017, Lyon, France. pp.75-83
- Accès au texte intégral et bibtex
-

-
- titre
- Fast reconstruction of image deformation field using radial basis function
- auteur
- Lukáš Ručka, Igor Peterlík
- article
- ISBI2017 - International Symposium on Biomedical Imaging, Apr 2017, Melbourne, Australia
- Accès au texte intégral et bibtex
-

-
- titre
- Model-Based Generation of Synthetic 3D Time-Lapse Sequences of Motile Cells with Growing Filopodia
- auteur
- Dmitry V Sorokin, Igor Peterlik, Vladimír V Ulman, David Svoboda, Martin Maška
- article
- International Symposium on Biomedical Imaging, Apr 2017, Melbourne, Australia
- Accès au texte intégral et bibtex
-

-
- titre
- Face-based Smoothed Finite Element Method for Real-time Simulation of soft tissue
- auteur
- Andrea Mendizabal, Rémi Bessard Duparc, Huu Phuoc Bui, Christoph J Paulus, Igor Peterlik, Stéphane Cotin
- article
- SPIE Medical Imaging, Feb 2017, Orlando, United States
- Accès au texte intégral et bibtex
-

Book sections
-
- titre
- Nonlinear Biomechanical Model of the Liver
- auteur
- Stéphanie Marchesseau, Simon Chatelin, Hervé Delingette
- article
- Yohan Payan; Jacques Ohayon. Biomechanics of Living Organs. Hyperelastic Constitutive Laws for Finite Element Modeling, Elsevier, pp.243 - 265, 2017, 978-0-12-804009-6. ⟨10.1016/b978-0-12-804009-6.00011-0⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Biomechanical modeling of brain soft tissues for medical applications
- auteur
- Fanny Morin, Matthieu Chabanas, Hadrien Courtecuisse, Yohan Payan
- article
- Payan, Yohan; Ohayon, Jacques. Biomechanics of Living Organs, Academic Press, pp.127-146, 2017, ⟨10.1016/B978-0-12-804009-6.00006-7⟩
- Accès au texte intégral et bibtex
-

Poster communications
-
- titre
- Deformed Reality: Proof of concept and preliminary results
- auteur
- Nazim Haouchine, Antoine Petit, Frederick Roy, Stéphane Cotin
- article
- ISMAR 2017 - 16th IEEE International Symposium on Mixed and Augmented Reality, Oct 2017, Nantes, France. 2017
- Accès au texte intégral et bibtex
-

Theses
-
- titre
- Robust personalisation of 3D electromechanical cardiac models. Application to heterogeneous and longitudinal clinical databases
- auteur
- Roch Molléro
- article
- Signal and Image processing. COMUE Université Côte d'Azur (2015 - 2019), 2017. English. ⟨NNT : 2017AZUR4106⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Topological Changes in Simulations of Deformable Objects
- auteur
- Christoph Joachim Paulus
- article
- Modeling and Simulation. University of Strasbourg, 2017. English. ⟨NNT : ⟩
- Accès au texte intégral et bibtex
-
