2025
Conference papers
- titre
- Optimizing Geothermal Reservoirs: Enhanced Natural State Representation
- auteur
- Antoine Armandine Les Landes, Théophile Lohier, Yanis Haouchine, Romain Chassagne
- article
- 86th EAGE Annual Conference & Exhibition, Jun 2025, Toulouse, France
- resume
- This study presents a data assimilation approach to geothermal reservoir modeling using the Orison environment. The research addresses the challenges of understanding complex geothermal systems, such as those in the Rhine Graben, with the goal of reducing exploration risks and improving well placement strategies. The methodology progresses from synthetic models to real-world applications at the Soultz-sous-Forêts geothermal site.
Key findings highlight the importance of geological complexity and well positioning in capturing hydrothermal dynamics. Results from synthetic cases validated the framework's ability to replicate critical phenomena like convection, emphasizing the significance of measurements near faults for accuracy. Finally, real-world applications demonstrated the framework's capacity to calibrate models effectively, aligning with observed temperature gradients and hydrothermal behaviours.
These insights contribute to the creation of 3D hydrothermal models, supporting decisionmaking for exploration, risk mitigation, and sustainable resource management
- Accès au bibtex
-

2024
Journal articles
-
- titre
- FBG-Driven simulation for virtual augmentation of fluoroscopic images during endovascular interventions
- auteur
- Valentina Scarponi, Juan Verde, Nazim Haouchine, Michel Duprez, Florent Nageotte, Stéphane Cotin
- article
- Healthcare Technology Letters, 2024, ⟨10.1049/htl2.12108⟩
- resume
- Endovascular interventions are procedures designed to diagnose and treat vascular diseases, using catheters to navigate inside arteries and veins. Thanks to their minimal invasiveness, they offer many benefits, such as reduced pain and hospital stays, but also present many challenges for clinicians, as they require specialized training and heavy use of X-rays. This is particularly relevant when accessing (i.e., cannulating) small arteries with steep angles, such as most aortic branches. To address this difficulty, we propose a novel solution that enhances fluoroscopic 2D images in real-time by displaying virtual configurations of the catheter and guidewire. In contrast to existing works, proposing either simulators or simple augmented reality frameworks, our approach involves a predictive simulation showing the resulting shape of the catheter after guidewire withdrawal without requiring the clinician to perform this task. Our system demonstrated accurate prediction with a mean 3D error of 2.4±1.3 mm and a mean error of 1.1±0.7 mm on the fluoroscopic image plane between the real catheter shape after guidewire withdrawal and the predicted shape. A user study reported an average intervention time reduction of 56 % when adopting our system, resulting in a lower X-ray exposure.
- Accès au texte intégral et bibtex
-


-
- titre
- Spatial Distribution, Ecological Risk and Analysis of Sources of Trace Metal Elements in Surface Sediments of Pond Thomas (Brenne), France
- auteur
- Amina Haouchine, Rachid Nedjai, Mikael Motelica-Heino, Saskia Erdmann, Zoubida Nemer
- article
- Ecological Engineering & Environmental Technology, 2024, 25 (8), pp.194-206. ⟨10.12912/27197050/189627⟩
- resume
- This study aims to contribute to understanding the processes influencing the spatial distributions of trace metal elements in surface sediments of Brenne's ponds (France) and assess potential pollution levels in the area. It was motivated by the lack of knowledge regarding the hydrogeochemical dynamics of limnic entities, which are ponds. To achieve this, 25 sediment samples were collected from Pond Thomas , considered as a ‘sentinel pond’, and underwent analysis for grain size, total organic carbon (TOC) concentrations, and trace metal elements (TMEs) (specifically Cu, Ni, Pb, As, Zn, Cr, and Cd). The results revealed that trace metal elements are primarily concentrated in two areas: the northwest section and the upstream region in the southern part of the pond. Applying various pollution indicators such as the enrichment factor (EF), geo-accumulation index (Igeo), and potential ecological risk index (RI), it was found that Pb and As are the most enriched elements, with respective EFs of 3.5 and 4.9. Their average concentrations exceed geochemical background values by 4 and 5.68 times in certain samples. The sediments in the southern part of the pond showed moderate contamination levels for As and Pb, with moderate to severe pollution (2 < Igeo < 3), reaching a maximum Igeo of 2.26 for As. Although the RI values across the pond are relatively low, Cd and As still pose moderate potential ecological risks. Additionally, principal component analysis and Pearson correlation analysis indicated two sources of TMEs in the area: Zn, As, Ni, Cd, Pb, and Cr are primarily from natural sources, while Cu appears to have a local anthropogenic origin.
- Accès au texte intégral et bibtex
-

-
- titre
- Raman identification of CaCO3 polymorphs in concrete prepared with carbonated recycled concrete aggregates
- auteur
- M. Marchetti, G. Gouadec, M. Offroy, M. Haouchine, A. Djerbi, O. Omikrine-Metalssi, J.-M. Torrenti, Jean-Michel Mechling, G. Simon, Philippe Turcry, P. Barthelemy, O. Amiri
- article
- Materials and structures, 2024, 57 (2), pp.28. ⟨10.1617/s11527-024-02296-z⟩
- resume
- The urge to preserve natural resources, to reduce cement production CO2 emissions and to recycle concrete waste conducted to the French national program FastCarb. It is aimed at using recycled concrete aggregates (RCAs), once carbonated with CO2 coming from cement production sites, as a replacement for natural aggregates. The carbonation step serves to reduce the porosity of the old cement paste and to improve future concrete properties. Two different carbonation processes (rolling drum (P1), fluidized bed (P2)) were tested and the resulting RCAs were mixed in different weight proportions with natural aggregates to elaborate new concretes. Raman investigations were then conducted on some sections to analyze the carbonated phases and their spatial distribution.
Results indicated a difference in polymorphs distributions. Process P1 seems to generate more vaterite than process P2, which mainly generates calcite and aragonite. They also allowed to appreciate the thickness of the interface between the old and the new cement pastes.
- Accès au texte intégral et bibtex
-

Conference papers
-
- titre
- FBG-Driven simulation for virtual augmentation of fluoroscopic images during endovascular interventions
- auteur
- Valentina Scarponi, Juan Verde, Nazim Haouchine, Michel Duprez, Florent Nageotte, Stéphane Cotin
- article
- Medical Imaging and Augmented Reality, Augmented Environments for Computer Assisted Interventions (AE-CAI), Computer Assisted and Robotic Endoscopy (CARE) and Context-Aware Operating Theaters (OR 2.0) - MICCAI 2024 workshop, Oct 2024, Marrackech, Morocco
- resume
- Endovascular interventions are procedures designed to diagnose and treat vascular diseases, using catheters to navigate inside arteries and veins. Thanks to their minimal invasiveness, they offer many benefits, such as reduced pain and hospital stays, but also present many challenges for clinicians, as they require specialized training and heavy use of X-rays. This is particularly relevant when accessing (i.e., cannulating) small arteries with steep angles, such as most aortic branches. To address this difficulty, we propose a novel solution that enhances fluoroscopic 2D images in real-time by displaying virtual configurations of the catheter and guidewire. In contrast to existing works, proposing either simulators or simple augmented reality frameworks, our approach involves a predictive simulation showing the resulting shape of the catheter after guidewire withdrawal without requiring the clinician to perform this task. Our system demonstrated accurate prediction with a mean 3D error of 2.4±1.3 mm and a mean error of 1.1±0.7 mm on the fluoroscopic image plane between the real catheter shape after guidewire withdrawal and the predicted shape. A user study reported an average intervention time reduction of 56 % when adopting our system, resulting in a lower X-ray exposure.
- Accès au texte intégral et bibtex
-

2023
Conference papers
- titre
- Utilisation du LiDAR terrestre pour caractériser la variabilité spatio-temporelle des sédiments alluviaux
- auteur
- Yanis Haouchine, Laure Guerit, Paul Leroy, Dimitri Lague
- article
- 28e édition de la Réunion des Sciences de la Terre (RST 2023), Société Géologique de france (SGF), Oct 2023, Rennes, France
- resume
- Le transport des sédiments grossiers dans les rivières joue un rôle majeur dans la dynamique des paysages. Au-delà des flux en jeu, la capacité des rivières à mobiliser leurs sédiments dépend fortement de la distribution de taille de ces derniers. De nombreuses méthodes ont donc été développées pour caractériser la granulométrie des sédiments grossiers. Les méthodes classiques couvrent souvent des zones limitées et sont fastidieuses à mener. Elles offrent donc une caractérisation limitée de la variabilité spatiale des sédiments fréquemment observée le long des rivières. Les méthodes photographiques travaillent à plus grande échelle mais n'offrent qu'une vision 2D d'un problème 3D. Le développement de méthode de mesures basées sur l'analyse de nuages de points 3D permet de s'affranchir de ces limites.Cependant, l'utilisation de nuages de points pour la granulométrie nécessite un travail de préparation du nuage du points pour isoler les sédiments grossiers (>cm) du reste de la scène. Ici, nous présentons le travail effectué pour extraire la granulométrie d'une zone alluviale le long de l'Hérault (sud de la France) à partir d'un nuage de points. Les données ont été acquises avec un LiDAR terrestre Z+F Imager 5016) avec une résolution de 1.6 mm à 10 m, permettant de capturer la majorité des grains d'intérêt. Afin d'isoler les grains grossiers, nous effectuons d'abord une classification avec 3DMASC (Letard et al. soumis) afin d'identifier 5 catégories d'objets : les grains grossiers, le sable, les parois rocheuses des berges de la rivière, la végétation et les constructions humaines. Les zones de graviers sont ensuite traitées avec G3Point (Steer et al, 2022, Esurf) pour obtenir leur granulométrie. Ce protocole est ensuite appliqué à des données acquises lors d'une seconde campagne pour tester la généralisation du classifieur. Les premières analyses suggèrent une organisation des sédiments avec une alternance de zones plus fines et plus grossières. Notre objectif est d'exploiter l'étendue spatiale des données pour déterminer l'échelle caractéristique au-delà de laquelle cette variabilité ne s'exprime plus. L'utilisation de données LiDAR permet donc ici un saut quantitatif majeur dans la caractérisation de la variabilité spatiale et temporelle de la taille des sédiments.
- Accès au bibtex
-
- titre
- Identification par spectroscopie Raman de polymorphes de CaCO3 présents dans des bétons de granulats de béton recyclé carbonatés et utilisés comme puits de CO2
- auteur
- Mario Marchetti, Gwenaël Gouadec, M. Offroy, Merzouk Haouchine, Guilhem Simon
- article
- 29ème Journées thématiques du GFSV, GFSV, May 2023, Deauville, France
- resume
- La préservation des ressources naturelles et à de réduire les émissions de CO2, dont celle causée par la production de ciment, et à recycler les déchets de béton issus de la déconstruction a conduit au programme national FastCarb. Il vise à utiliser des granulats de béton recyclé (GBR) pour de nouveaux bétons. Cependant, certaines caractéristiques microstructurales des GBR, dont la porosité, doivent être améliorées. Ainsi, leur carbonatation par du CO2 des sites de production de ciment est une solution. Cette étape réduit la porosité et améliore les propriétés futures du béton élaborés avec des GBR carbonatés. Deux procédés de carbonatation différents ont été mis en oeuvre et les GBR ainsi traités mélangés dans des proportions différentes avec des granulats naturels pour élaborer de nouveaux bétons. Des mesures Raman ont ensuite été effectuées sur certaines coupes pour analyser les phases carbonatées [1, 2] et leur répartition spatiale. Les résultats et les analyses chimiométriques ont montré une différence dans les distributions des polymorphes de CaCO3 selon le processus de carbonatation, et l'épaisseur de l'interface entre les anciennes et les nouvelles pâtes de ciment. carbonatation par lit fluidisé carbonatation par tambour rotatif calcite aragonite vatérite Figure 1. Exemples de distributions spatiales de polymorphes de CaCO3 selon le process de carbonatation par traitement chimiométriques MCR-ALS de mesures Raman Références: [1] Wehrmeister U., Soldati A. L., Jacob D. E., Häger, T., Hofmeister, W. (2010), Raman spectroscopy of synthetic, geological and biological vaterite: a Raman spectroscopic study. J. Raman Spectrosc., 41: 193-201. https://doi.org/10.1002/jrs.2438. [2] Ševčík R., Mácová P. Localized quantification of anhydrous calcium carbonate polymorphs using micro-Raman spectroscopy. Vibrational Spectroscopy, volume 95, 2018, pp. 1-6. https://doi.org/10.1016/j.vibspec.2017.12.005.
- Accès au bibtex
-
Book sections
- titre
- Augmented Reality for Computer-Guided Interventions
- auteur
- Stéphane Cotin, Nazim Haouchine
- article
- Andrew Yeh Ching Nee; Soh Kim Ong. Springer Handbook of Augmented Reality, Springer, pp.689, 2023, 978-3-030-67822-7. ⟨10.1007/978-3-030-67822-7_28⟩
- Accès au bibtex
-
Poster communications
- titre
- Exploratory study of infrared spectral signatures of a range of forest, agricultural and artificialized soils from the North-East of France
- auteur
- Hermine Huot, Merzouk Haouchine, Céline Caillet, M. Offroy
- article
- 29ème journées scientifiques du GFSV "Apport de la spectroscopie vibrationnelle dans la transition environnementale", May 2023, Deauville, France
- resume
- Artificialized soils encompass a large diversity depending both on the environmental conditions and the history of land uses. Their study requires to develop an approach to compare and classify them. Vibrational spectroscopies are used in soil science to collect rapid and cost-effective molecular information about inorganic and organic soil constituents [1]. Coupled with chemometrics approaches (e.g. [2]), they can be used to estimate some properties and/or to classify soils [3]. This study aims at exploring the potential of mid-infrared spectroscopy (i) to differentiate soils depending on past land uses, (ii) to propose a soil typology and (iii) to define markers of human activities. A set of 150 surface soil samples from the North-East of France was selected, including agricultural and forest soils developed on various bedrocks and soils impacted by iron and glass industry, mining, charcoal production or old human settlements. Mid-infrared analyses were run in diffuse reflectance mode. An exploratory study was performed on the preprocessed spectra using ascending hierarchical classification and principal component analysis. Studied soils can be distinguished based on their mineralogical composition (carbonates, clays) and, to a lesser extent, on the presence of organic compounds (Fig1). However, changes related to old settlements, mining or charcoal production were more difficult to discriminate. This could be improved by coupling several spectroscopic analyses providing complementary information on the samples.
- Accès au bibtex
-
Theses
-
- titre
- Development of Chemometrics tools for monitoring contamination by polycyclic aromatic compounds in complex environmental matrices
- auteur
- Merzouk Haouchine
- article
- Géochimie. Université de Lorraine, 2023. Français. ⟨NNT : 2023LORR0158⟩
- resume
- In Europe, 332,500 sites are contaminated with polycyclic aromatic compounds (PACs), including polycyclic aromatic hydrocarbons (PAHs). These PACs consist of several hundred molecules and exhibit well-established toxic, mutagenic, and carcinogenic properties. Currently, only 16 PAHs are monitored for diagnostic and monitoring purposes in contaminated sites, as they are listed as priority pollutants by the US-EPA. However, this limited approach does not fully represent the overall contamination, which can be described as a molecular-scale continuum ranging from simple compounds with two to seven aromatic rings to more complex macromolecules. Undergoing various transformation processes during natural attenuation phenomena or remediation treatments (such as biodegradation or chemical oxidation), the nature of pollution evolves. Only a comprehensive characterization of contamination coupled with appropriate data processing techniques can provide insights into such evolution. The objective of this thesis is therefore to develop and apply various chemometric approaches to characterize complex environmental matrices containing PACs. Chemometrics is a discipline derived from mathematics that aims to extract maximum information in order to gain a more comprehensive interpretation of samples analyzed in physico-chemical studies. To achieve this, several analytical techniques will be used to characterize organic extracts from contaminated matrices (soils): 3D fluorescence, Raman spectroscopy, UV-Visibile spectroscopy, and gas chromatography coupled with mass spectrometry. Among the many mathematical methods developed in chemometrics, multivariate analysis techniques have already demonstrated their potential with the aforementioned analytical techniques (e.g., PARAFAC, MCR-ALS, etc.). However, one of the challenges in their application lies in the nature of the analyzed sample itself. Undesirable "effects" can occur in the signals from these instruments (e.g., baseline deviation, water interference, heating effects, spectral overlap, retention time shifts, etc.). This thesis work will rely on (i) existing data sets at the organic geochemistry laboratory where information on sources and/or processes is known to test the effectiveness of the developed chemometric treatments, and (ii) new data sets to apply the developed methodology under real conditions. The strategy employed will focus on several interdisciplinary axes. Firstly, the best mathematical preprocessing methods will be determined based on the specific instrumental technique used. Subsequently, multivariate resolution techniques such as MCR-ALS and PARAFAC will be independently tested for each data set generated from these different instruments. This work will provide insights into the characterization of pure or mixed CAP species present in complex environmental matrices, as well as their evolution over time (nature of transformed and/or generated products, involved mechanisms, and influence of parameters).
- Accès au texte intégral et bibtex
-

2022
Journal articles
-
- titre
- Handle Matrix Rank Deficiency, Noise, and Interferences in 3D Emission–Excitation Matrices: Effective Truncated Singular-Value Decomposition in Chemometrics Applied to the Analysis of Polycyclic Aromatic Compounds
- auteur
- Merzouk Haouchine, Coralie Biache, Catherine Lorgeoux, Marc Offroy, Pierre Faure,
- article
- ACS Omega, 2022, 7 (27), pp.23653-23661. ⟨10.1021/acsomega.2c02256⟩
- resume
- The characterization of organic compounds in polluted matrices by eco-friendly three-dimensional (3D) fluo-rescence spectroscopy coupled with chemometric algorithms constitutes a powerful alternative to the separation techniques conventionally used. However, the systematic presence of Rayleigh and Raman scattering signals in the excitation−emission matrices (EEMs) complicates the spectral decomposition via PARAllel FACtor analysis (PARAFAC) due to the nontrilinear structure of these signals. Likewise, the specific problem of selectivity in spectroscopy for unexpected chemical components in a complex sample may render its chemical interpretation difficult at first glance. The relevant chemical information can then be complicated to extract, especially if the raw data is noisy. There are several strategies to overcome these drawbacks, but weaknesses remain. As a consequence, a new alternative method is proposed to handle these interferences, the noise, and the rank deficiencies in the data and applied for the characterization of polycyclic aromatic compound (PAC) mixtures. It is based on effective truncated singular-value decomposition (MT-SVD) that does not require any prior knowledge of the raw data. The algorithm provides a valuable estimation of the global rank to choose on complex samples where selectivity problems are observed. It is a real alternative compared to other existing methods applied to the fluorescence matrix to filter the signal from noise or light scattering effects. The first exploratory results of the proposed algorithm are promising to handle matrix rank deficiencies as well as the effects of noise and light scattering on complex PAC mixture
- Accès au texte intégral et bibtex
-

-
- titre
- Cortical Vessel Segmentation for Neuronavigation using Vesselness-enforced Deep Neural Networks
- auteur
- Nazim Haouchine, Michael Nercessian, Parikshit Juvekar, Alexandra Golby, Sarah Frisken
- article
- IEEE Transactions on Medical Robotics and Bionics, 2022
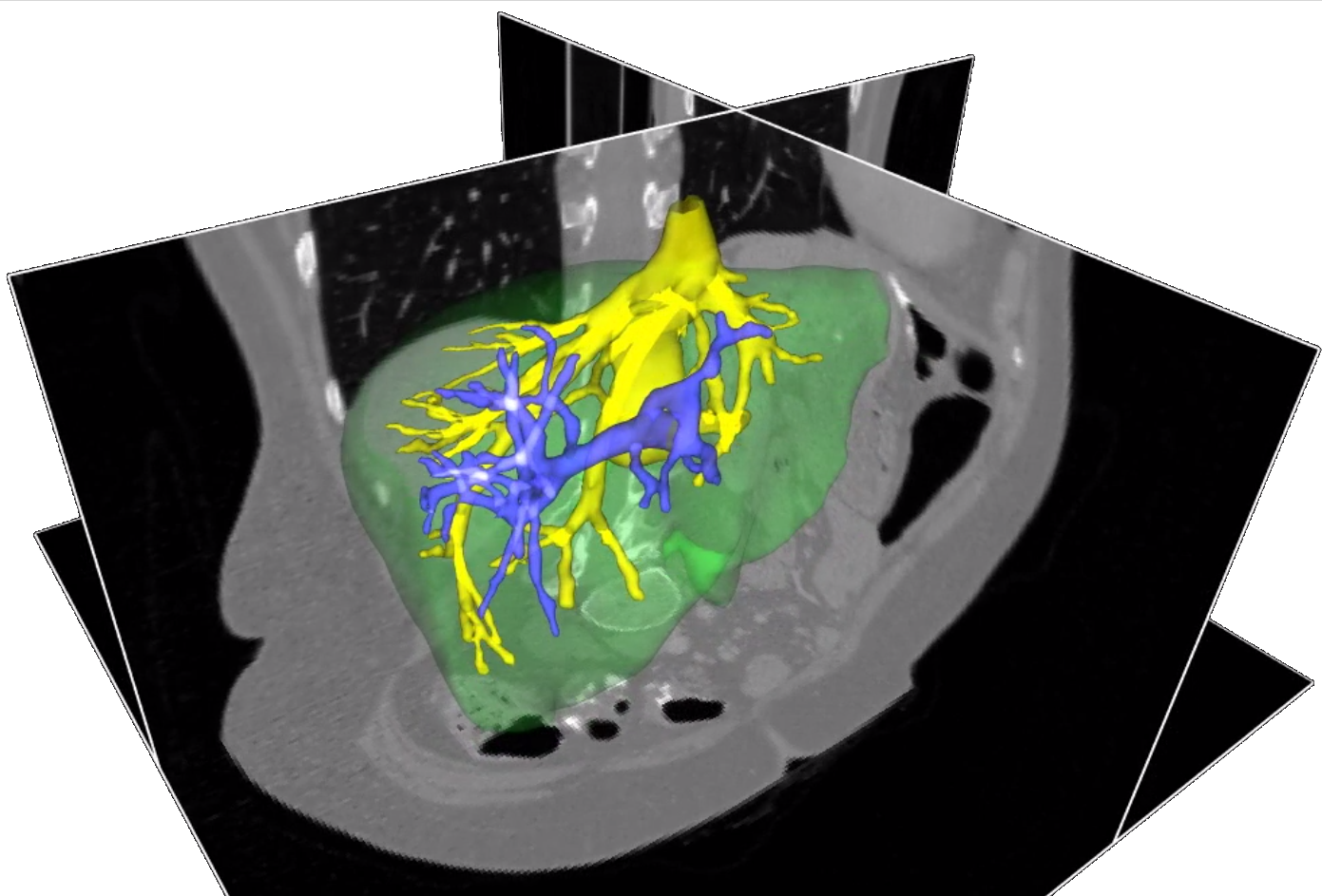
- resume
- We propose in this paper an efficient method to segment cortical vessels in craniotomy images acquired by the surgical microscope. Our method uses a vesselness-enforced convolutional neural network to classify each pixel of a craniotomy image as a vessel or surrounding tissue. This permits training the network not only on appearance-based features but also on geometrical-based constraints that will ensure the continuity of the vascular trees. Our solution uses neural style transfer to generate new instances of images from manually labeled data leading to augment the training dataset in an anatomically semantic manner. The generated images improve the generalization of our model to various types of cortical surface appearances and vascular geometries. We conducted experiments on real images from human patients that demonstrate that accurate intraoperative cortical vessel segmentation can be achieved.
- Accès au texte intégral et bibtex
-

-
- titre
- Pose Estimation and Non-rigid Registration for Augmented Reality during Neurosurgery
- auteur
- Nazim Haouchine, Parikshit Juvekar, Michael Nercessian, William Wells, Alexandra Golby, Sarah Frisken
- article
- IEEE Transactions on Biomedical Engineering, 2022, 69 (4), pp.1310 - 1317. ⟨10.1109/TBME.2021.3113841⟩
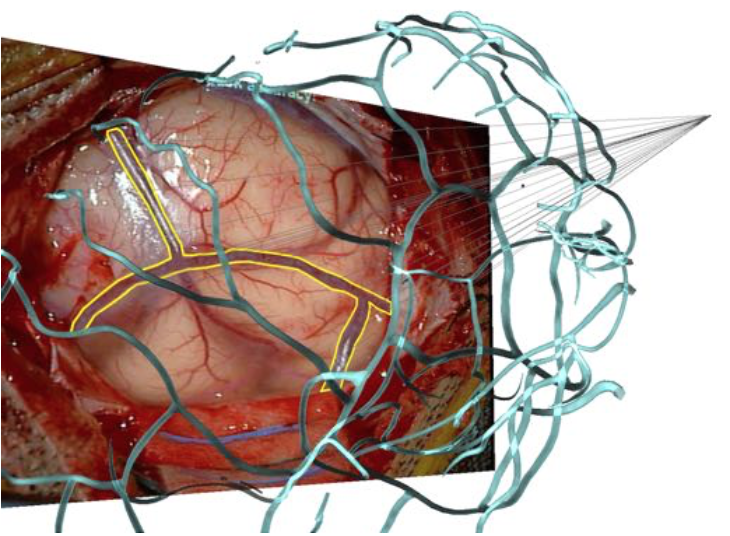
- resume
- Objective: A craniotomy is the removal of a part of the skull to allow surgeons to have access to the brain and treat tumors. When accessing the brain, a tissue deformation occurs and can negatively influence the surgical procedure outcome. In this work, we present a novel Augmented Reality neurosurgical system to superimpose pre-operative 3D meshes derived from MRI onto a view of the brain surface acquired during surgery. Methods: Our method uses cortical vessels as main features to drive a rigid then non-rigid 3D/2D registration. We first use a feature extractor network to produce probability maps that are fed to a pose estimator network to infer the 6-DoF rigid pose. Then, to account for brain deformation, we add a nonrigid refinement step formulated as a Shape-from-Template problem using physics-based constraints that helps propagate the deformation to sub-cortical level and update tumor location. Results: We tested our method retrospectively on 6 clinical datasets and obtained low pose error, and showed using synthetic dataset that considerable brain shift compensation and low TRE can be achieved at cortical and sub-cortical levels. Conclusion: The results show that our solution achieved accuracy below the actual clinical errors demonstrating the feasibility of practical use of our system. Significance: This work shows that we can provide coherent Augmented Reality visualization of 3D cortical vessels observed through the craniotomy using a single camera view and that cortical vessels provide strong features for performing both rigid and non-rigid registration.
- Accès au texte intégral et bibtex
-

- titre
- Efficacy of Benzodiazepines and Related Drugs in Patients over 75~Years of Age and Impact on Cognition.
- auteur
- Alexis Minouflet, Khelifa Hamouchi, Massinissa Haouchine, Béatrice Berteaux, Jean-Marie Sérot, Ingrid Gyselinck, Salif Dao, Olivier Balédent, Jadwiga Attier-Zmudka
- article
- Aging Clinical and Experimental Research, 2022, ⟨10.1007/s40520-022-02196-8⟩
- resume
- BACKGROUND: In France, despite the known risks, the use of benzodiazepines and related (BZD) is excessive, particularly in older populations. Over the age of 70, 1 person in 2 uses BZD on a long-term basis (more than 3~years), whereas it is recommended not to exceed 12~weeks. To compensate for the numerous undesirable effects and to maintain a positive benefit-risk balance, these treatments must be very effective and improve significantly the quality of life. AIMS: This study aims to determine whether the efficacy of BZD outweighs their adverse effects in older population. METHODS: In a population of 109 patients with cognitive impairment and hospitalized in Saint-Quentin (France), we recorded the use of BZD and medical background. Neuropsychological and geriatric assessments allowed cognitive and thymic evaluation. RESULTS: In our cohort of 109 patients, 50% of the subjects were BZD\,+\,and 78% were women. Patients in the BZD\,+\,group were no longer anxious but had poorer cognitive and executive performance than controls. DISCUSSION: Long-term treatment of anxiety in patients aged 75 and over with BZD appears to be effective. The deleterious impact of BZD on cognition has been demonstrated. CONCLUSIONS: These results tend to consider non-medicinal therapies as serious alternatives to BZD for treating anxiety in the older population.
- Accès au bibtex
-
Poster communications
- titre
- Gérer la déficience du rang matriciel, le bruit et les interférences dans les matrices d’émission-excitation de fluorescence grâce à la chimiométrie : un nouvel algorithme appliqué à l’analyse des composés aromatiques polycycliques
- auteur
- Merzouk Haouchine, Coralie Biache, Catherine Lorgeoux, Pierre Faure, M. Offroy
- article
- FROG V, Jul 2022, Rennes, France
- resume
- La caractérisation de la contamination des matrices environnementales, par des composés organiques, via la spectroscopie de fluorescence 3D couplée aux algorithmes de chimiométrie constitue une alternative puissante aux techniques séparatives conventionnelles [1]. Cependant, la présence systématique des signaux de diffusion Rayleigh et/ou Raman dans les matrices d’émission-excitation de fluorescence (EEM) complique la décomposition spectrale via l’analyse PARAllel FACtor (PARAFAC) à cause de la structure non-trilinéaire de ces signaux. De plus, un problème spécifique de sélectivité en spectroscopie pour des composants chimiques inattendus dans un échantillon complexe peut rendre son interprétation chimique difficile à première vue. L’information chimique pertinente peut alors être compliquée à extraire, surtout si les données brutes sont bruitées. Il existe plusieurs stratégies pour pallier ces inconvénients mais des faiblesses subsistent [2]. En conséquence, une nouvelle méthode alternative est proposée pour gérer ces interférences, le bruit et la déficience du rang matriciel dans les données. Elle est appliquée pour la caractérisation des mélanges de composés aromatiques polycycliques (CAP). Elle est basée sur une décomposition en valeurs singulières tronquées efficacement (MT-SVD) qui ne nécessite aucune connaissance préalable sur les données brutes. L'algorithme fournit une estimation précieuse du rang matriciel optimal à choisir sur des échantillons complexes où des problèmes de sélectivité sont observés. C'est une véritable alternative par rapport aux autres méthodes existantes appliquées sur les EEM de fluorescence pour filtrer le signal du bruit ou gérer les effets de diffusion de la lumière. Les premiers résultats exploratoires de l'algorithme sont prometteurs pour gérer la déficience du rang matriciel ainsi que les effets du bruit et de la diffusion de la lumière sur les mélanges complexes de CAP. Enfin, le MT-SVD est un algorithme flexible et il sera testé sur d'autres techniques instrumentales (par exemple l'imagerie Raman) et d'autres types d'échantillons.
- Accès au bibtex
-
- titre
- A new chemometrics preprocessing based on effective information truncation to handle matrix rank deficiencies as well as the effects of noise and light scattering in 3D excitation emission fluorescence matrices
- auteur
- Merzouk Haouchine, Coralie Biache, Catherine Lorgeoux, Pierre Faure, M. Offroy
- article
- 23ème Congrès de Chimiométrie, Jun 2022, Brest, France
- resume
- 1 Introduction Fluorescence spectroscopy exploits the phenomenon of natural or induced fluorescence emission, from intrinsic fluorophores or fluorescent chemical derivatives after addition of extrinsic fluorophores, respectively [1]. Polycyclic aromatic compounds (PACs) constitute a large family of mainly anthropogenic chemical contaminants. They have at least two aromatic rings which give them intrinsic fluorescence [2]. Their characterization by eco-friendly 3D fluorescence spectroscopy coupled with chemometrics algorithms constitutes a powerful alternative to the separative techniques conventionally used. However, the systematic presence of Rayleigh and Raman scattering signals in the Excitation Emission Matrices (EEMs) makes spectral decomposition via PARAllel FACtor analysis (PARAFAC) difficult due to the non-trilinear structure of these signals and the matrix rank deficiencies that they generate. There are several strategies to overcome these light scattering effects but weakness remain [3]. Thus, a new chemometrics approach to push back matrix rank deficiencies and to handle these interferences and noise in the data is suggested in this work. It is based on advanced truncation strategy in singular value decomposition (SVD) [4]. 2 Theory The home-made algorithm is structured in three main steps, the step #1 is about data formatting. It allows to prepare data for processing. In the case of EEMs, the reshape operation allows to toggle from 3D space to 2D space thanks to the row-wise or column-wise matrix augmentation. Step #2 exploits an advanced SVD truncation strategy. The challenge with this method is determining the truncation threshold which is the number of singular values to retain and which low rank to choose. The proposed approach attempts to overcome this difficulty because the optimal low-rank is not chosen according to singular values curve versus their numbers, but is deduced through image analysis. Step #3 is a reconstruction of clean data matrix deduced from selected singular values representing all the chemical compound information. 3 Material and methods In order to implement the home-made algorithm, EEMs of 47 samples were acquired to build a database. Four PACs were selected: Naphthalene (NPH); Benz[a]Anthracene (BaA); Anthracene (ANT) and Pyrene (PYR). The database was distributed as three datasets, where dataset 1 was for individual PAC in dichloromethane at six different concentrations (20, 10, 1, 0.25, 0.1 and 0.05 mg. L-1), while dataset 2 was for mixtures of NPH and BaA at varying concentrations in the same solvent. Dataset 3 was for mixtures of the four species at varying concentrations. An Aqualog® fluorescence spectrometer was used to acquire EEMs. It is equipped with a charge coupled device detector (CCD) set to medium gain and time integration equal to 1 second. The samples were excited using a range of excitation wavelengths between 239 and 800 nm with a pitch of 3 nm. The fluorescence emission was collected in a wavelength range between 248.27 and 829.32 nm with a resolution of 4 pixels (i.e. 2.33 nm). A Quartz SUPRASIL® cell with a light path equal to 10 mm was used. 4 Results and discussion In the example shown in the Figure 1, the chemical information is kept intact while the scattering signals have been removed by the preprocessing. Furthermore, the optimal low-rank is found through image analysis and the percentage of information, explained at the truncated matrix level coupled with the analysis of residual information. Finally, a region-based segmentation algorithm enabled automatic cropping of the cleaned map. 5 Conclusion The method proposed in this work is based on one of the most common algorithms in linear algebra (i.e. SVD) with an original imaging approach to its application with EEM or EEMs data. Its advantages are that it does not require any information concerning the scattering signals and effectively handle these interferences and noise. Moreover, it provides the percentage of chemical information and noise in the raw data. Finally, it fends off matrix rank deficiencies and generates an estimation of the number of factors to choose for spectral decomposition like PARAFAC.
- Accès au bibtex
-
- titre
- Handle matrix rank deficiency, noise and interferences in 3D emission-excitation matrices using chemometrics: a new algorithm applied to the analysis of polycyclic aromatic hydrocarbons
- auteur
- Merzouk Haouchine, Coralie Biache, Catherine Lorgeoux, Pierre Faure, M. Offroy
- article
- GFSV 2022, May 2022, Nivelles, Belgium
- resume
- The characterization of organic compounds in polluted matrices by eco-friendly 3D fluorescence spectroscopy coupled with chemometrics algorithms constitutes a powerful alternative to the separative techniques conventionally used1. However, the systematic presence of Rayleigh and/or Raman scattering signals in the Excitation Emission Matrices (EEMs) complicates the spectral decomposition via PARAllel FACtor analysis (PARAFAC) due to the non-trilinear structure of these signals. Likewise, specific problem of selectivity in spectroscopy for unexpected chemical components in a complex sample may render its chemical interpretation difficult at first glance. The chemical relevant information can then be complicated to extract, especially if the raw data is noisy. There are several strategies to overcome these drawbacks but weaknesses remain2. As a consequence, a new alternative method is proposed to handle these interferences, noise and rank deficiencies in the data and applied for the characterization of polycyclic aromatic compound (PAC) mixtures. It is based on an effective truncated singular value decomposition (MT-SVD) which does not require any prior knowledge on the raw data. The algorithm provides a valuable estimation of the optimal low-rank to choose on complex samples where selectivity problems are observed. It is a real alternative compared to other existing methods applied on fluorescence matrix to filter the signal from noise or light scattering effects. The first exploratory results of the proposed algorithm are promising to handle matrix rank deficiencies as well as the effects of noise and light scattering on complex PAC mixtures. Finally, the MT-SVD is a flexible algorithm and it will be tested on other instrumental techniques (e.g. Raman imaging) and other types of samples.
- Accès au bibtex
-
2021
Conference papers
-
- titre
- Estimation of High Framerate Digital Subtraction Angiography Sequences at Low Radiation Dose
- auteur
- Nazim Haouchine, Parikshit Juvekar, Xin Xiong, Jie Luo, Tina Kapur, Rose Du, Alexandra Golby, Sarah Frisken
- article
- MICCAI 2021 - Medical Image Computing and Computer Assisted Interventions, Sep 2021, Strasbourg, France
- resume
- Digital Subtraction Angiography (DSA) provides high resolution image sequences of blood flow through arteries and veins and is considered the gold standard for visualizing cerebrovascular anatomy for neurovascular interventions. However, acquisition frame rates are typically limited to 1-3 fps to reduce radiation exposure, and thus DSA sequences often suffer from stroboscopic effects. We present the first approach that permits generating high frame rate DSA sequences from low frame rate acquisitions eliminating these artifacts without increasing the patient's exposure to radiation. Our approach synthesizes new intermediate frames using a phase-aware Convolutional Neural Network. This network accounts for the non-linear blood flow progression due to vessel geometry and initial velocity of the contrast agent. Our approach outperforms existing methods and was tested on several low frame rate DSA sequences of the human brain resulting in sequences of up to 17 fps with smooth and continuous contrast flow, free of flickering artifacts.
- Accès au texte intégral et bibtex
-

-
- titre
- Deep Cortical Vessel Segmentation Driven By Data Augmentation With Neural Image Analogy
- auteur
- Michael Nercessian, Nazim Haouchine, Parikshit Juvekar, Sarah Frisken, Alexandra Golby
- article
- ISBI 2021 - IEEE International Symposium on Biomedical Imaging, Apr 2021, Nice, France
- resume
- During a craniotomy, a bone flap is temporarily removed from the skull to reveal the brain for surgery. The cortical vessels located at the surface of the brain are considered strong features to guide surgeons during the procedure, since they appear in both preoperative and intraoperative images and are an indication of how the brain may have shifted. We propose a method utilizing a deep neural network to perform cortical vessel segmentation in craniotomy images captured through the surgical microscope. Following a U-Net architecture, our solution classifies each pixel of a craniotomy image as vessel, parenchyma, or surrounding tissue and background. We use neural image analogy to build a diverse training set of unique images mirroring cortical anatomy generated from a limited amount of manually labeled data. The synthesized images enhance generalization of our model to various types of cortical surface appearances and geometries. Experiments on real data from human patients show that intraoperative cortical vessel segmentation can be performed accurately.
- Accès au texte intégral et bibtex
-

2020
Journal articles
-
- titre
- Predicted Microscopic Cortical Brain Images for Optimal Craniotomy Positioning and Visualization
- auteur
- Nazim Haouchine, Pariskhit Juvekar, Alexandra Golby, Sarah Frisken
- article
- Computer Methods in Biomechanics and Biomedical Engineering: Imaging & Visualization, 2020, ⟨10.1080/21681163.2020.1834874⟩
- resume
- During a craniotomy, the skull is opened to allow surgeons to have access to the brain and perform the procedure. The position and size of this opening are chosen in a way to avoid critical structures, such as vessels, and facilitate the access to tumors. Planning the operation is done based on pre-operative images and does not account for intra-operative surgical events. We present a novel image-guided neurosurgical system to optimize the craniotomy opening. Using physics-based modeling we define a cortical deformation map that estimates the displacement field at candidate craniotomy locations. This deformation map is coupled with an image analogy algorithm that produces realistic synthetic images that can be used to predict both the geometry and the appearance of the brain surface before opening the skull. These images account for cortical vessel deformations that may occur after opening the skull and is rendered in a way that increases the surgeon's understanding and assimilation. Our method was tested retrospectively on patients data showing good results and demonstrating the feasibility of practical use of our system.
- Accès au texte intégral et bibtex
-

Conference papers
- titre
- Interpréter : entre les mots, saisir les « presque mots »
- auteur
- Valérie Brasselet, Evelyne Pivard-Boubakri, Omar Haouchine
- article
- 22e colloque international de la revue l'Autre. "Ouvrir sa porte.. migrations, exils, replis, accès aux soins", Oct 2020, Nancy, France
- Accès au bibtex
-
-
- titre
- Deformation Aware Augmented Reality for Craniotomy using 3D/2D Non-rigid Registration of Cortical Vessels
- auteur
- Nazim Haouchine, Parikshit Juvekar, William M Wells Iii, Stéphane Cotin, Alexandra Golby, Sarah Frisken
- article
- Medical Image Computing and Computer Assisted Intervention, Oct 2020, Lima, Peru. pp.735--744
- resume
- Intra-operative brain shift is a well-known phenomenon that describes non-rigid deformation of brain tissues due to gravity and loss of cerebrospinal fluid among other phenomena. This has a negative influence on surgical outcome that is often based on pre-operative planning where the brain shift is not considered. We present a novel brain-shift aware Augmented Reality method to align pre-operative 3D data onto the deformed brain surface viewed through a surgical microscope. We formulate our non-rigid registration as a Shape-from-Template problem. A pre-operative 3D wire-like deformable model is registered onto a single 2D image of the cortical vessels, which is automatically segmented. This 3D/2D registration drives the underlying brain structures, such as tumors, and compensates for the brain shift in sub-cortical regions. We evaluated our approach on simulated and real data composed of 6 patients. It achieved good quantitative and qualitative results making it suitable for neurosurgical guidance.
- Accès au texte intégral et bibtex
-

-
- titre
- Alignment of Cortical Vessels viewed through the Surgical Microscope with Preoperative Imaging to Compensate for Brain Shift
- auteur
- Nazim Haouchine, Parikshit Juvekar, Alexandra Golby, William M Wells, Stéphane Cotin, Sarah Frisken
- article
- Medical Imaging 2020: Image-Guided Procedures, Robotic Interventions, and Modeling, Feb 2020, Houston, United States
- resume
- Brain shift is a non-rigid deformation of brain tissue that is affected by loss of cerebrospinal fluid, tissue manipulation and gravity among other phenomena. This deformation can negatively influence the outcome of a surgical procedure since surgical planning based on pre-operative image becomes less valid. We present a novel method to compensate for brain shift that maps preoperative image data to the deformed brain during intra-operative neurosurgical procedures and thus increases the likelihood of achieving a gross total resection while decreasing the risk to healthy tissue surrounding the tumor. Through a 3D/2D non-rigid registration process, a 3D articulated model derived from pre-operative imaging is aligned onto 2D images of the vessels viewed through the surgical miscroscopic intra-operatively. The articulated 3D vessels constrain a volumetric biomechanical model of the brain to propagate cortical vessel deformation to the parenchyma and in turn to the tumor. The 3D/2D non-rigid registration is performed using an energy minimization approach that satisfies both projective and physical constraints. Our method is evaluated on real and synthetic data of human brain showing both quantitative and qualitative results and exhibiting its particular suitability for real-time surgical guidance.
- Accès au texte intégral et bibtex
-
2019
Journal articles
- titre
- No limit in interspecific hybridization in schistosomes: observation from a case report
- auteur
- Jerôme Dépaquit, Mohammad Akhoundi, Djamel Haouchine, Stéphane Mantelet, Arezki Izri
- article
- Parasite, 2019, 26, pp.10. ⟨10.1051/parasite/2019010⟩
- Accès au bibtex
-
Conference papers
-
- titre
- Deformed Reality
- auteur
- Antoine Petit, Nazim Haouchine, Frédérick Roy, Dan B Goldman, Stéphane Cotin
- article
- Computer Graphics & Visual Computing (Eurographics), Sep 2019, Bangor, United Kingdom
- resume
- We present Deformed Reality, a new way of interacting with an augmented reality environment by manipulating 3D objects in an intuitive and physically-consistent manner. Using the core principle of augmented reality to estimate rigid pose over time, our method makes it possible for the user to deform the targeted object while it is being rendered with its natural texture, giving the sense of a interactive scene editing. Our framework follows a computationally efficient pipeline that uses a proxy CAD model for both pose computation, physically-based manipulations and scene appearance estimation. The final composition is built upon a continuous image completion and re-texturing process to preserve visual consistency. The presented results show that our method can open new ways of using augmented reality by not only augmenting the environment but also interacting with objects intuitively.
- Accès au texte intégral et bibtex
-

2018
Journal articles
-
- titre
- Calipso: Physics-based Image and Video Editing through CAD Model Proxies
- auteur
- Nazim Haouchine, Frédérick Roy, Hadrien Courtecuisse, Matthias Niessner, Stéphane Cotin
- article
- The Visual Computer, 2018, 36, pp.211-226. ⟨10.1007/s00371-018-1600-0⟩
- resume
- We present Calipso, an interactive method for editing images and videos in a physically-coherent manner. Our main idea is to realize physics-based manipulations by running a full physics simulation on proxy geometries given by non-rigidly aligned CAD models. Running these simulations allows us to apply new, unseen forces to move or deform selected objects, change physical parameters such as mass or elasticity, or even add entire new objects that interact with the rest of the underlying scene. In our method the user makes edits directly in 3D; these edits are processed by the simulation and then transfered to the target 2D content using shape-to-image correspondences in a photo-realistic rendering process. To align the CAD models, we introduce an efficient CAD-to-image alignment procedure that jointly minimizes for rigid and non-rigid alignment while preserving the high-level structure of the input shape. Moreover, the user can choose to exploit image flow to estimate scene motion, producing coherent physical behavior with ambient dynamics. We demonstrate physics-based editing on a wide range of examples producing myriad physical behavior while preserving geometric and visual consistency.
- Accès au texte intégral et bibtex
-

-
- titre
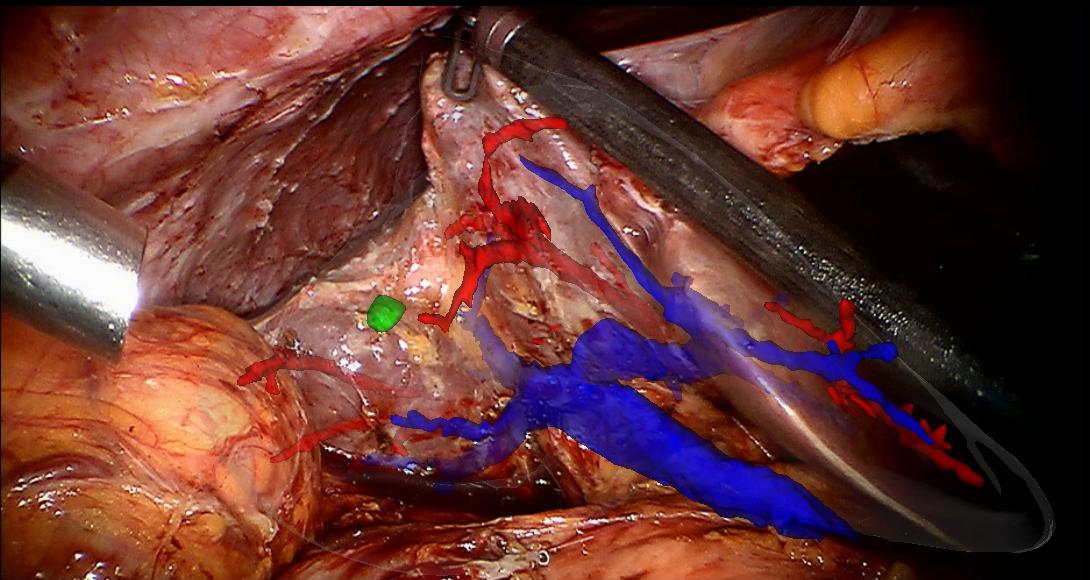
- Vision-based Force Feedback Estimation for Robot-assisted Surgery using Instrument-constrained Biomechanical 3D Maps
- auteur
- Nazim Haouchine, Winnie Kuang, Stéphane Cotin, Michael Yip
- article
- IEEE Robotics and Automation Letters, 2018, ⟨10.1109/LRA.2018.2810948⟩
- resume
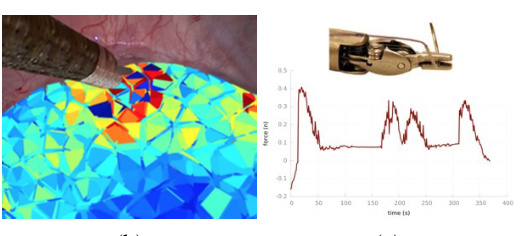
- We present a method for estimating visual and haptic force feedback on robotic surgical systems that currently do not include significant force feedback for the operator. Our approach permits to compute contact forces between instruments and tissues without additional sensors, relying only on endoscopic images acquired by a stereoscopic camera. Using an underlying biomechanical model built on-the-fly from the organ shape and by considering the surgical tool as boundary conditions acting on the surface of the model, contact force can be estimated at the tip of the tool. At the same time these constraints generate stresses that permit to compose a new endoscopic image as visual feedback for the surgeon. The results are demonstrated on in- vivo sequences of a human liver during robotic surgery, while quantitative validation is performed on an DejaVu and ex-vivo experimentation with ground truth to show the advantage of our approach.
- Accès au texte intégral et bibtex
-
- titre
- Simple synthesis of imidazo[1,2-A]pyridine derivatives bearing 2-aminonicotinonitrile or 2-aminochromene moiety
- auteur
- Arslane-Larbi Haouchine, Youssef Kabri, Saleha Bakhta, Christophe Curti, Bellara Nedjar-Kolli, Patrice Vanelle
- article
- Synthetic Communications, 2018, 48 (17), pp.2159--2168. ⟨10.1080/00397911.2018.1479759⟩
- resume
- A simple and general method for the synthesis of new imidazopyridines bearing an aminopyridinyl, chromenyl, or quinolinyl moiety in the C2 position was developed. The Knoevenagel reaction between imidazo[1,2-a]pyridine-2-carbaldehyde 1 and malononitrile resulted in the formation of starting material 2. Subsequently, intramolecular cyclization between the cyano group of 2 and acetophenones, naphtols, hydroxyquinolines, or phenols, gave 3, 4, 5, and 6 compounds, respectively. This is a simple, reproducible, and environmentally friendly method of synthesizing substituted imidazopyridines using water as a solvent or under solvent-free conditions. [GRAPHICS] .
- Accès au bibtex
-
2017
Conference papers
-
- titre
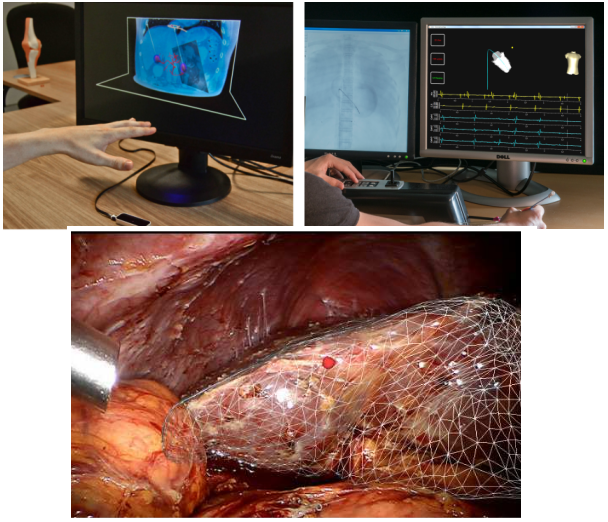
- DejaVu: Intra-operative Simulation for Surgical Gesture Rehearsal
- auteur
- Nazim Haouchine, Danail Stoyanov, Frederick Roy, Stéphane Cotin
- article
- Medical Image Computing and Computer Assisted Interventions Conference MICCAI 2017, Oct 2017, Quebec City, Canada
- resume
- Advances in surgical simulation and surgical augmented reality have changed the way surgeons prepare for practice and conduct medical procedures. Despite considerable interest from surgeons, the use of simulation is still predominantly confined to pre-operative training of surgical tasks and the lack of robustness of surgical augmented reality means that it is seldom used for surgical guidance. In this paper, we present DejaVu, a novel surgical simulation approach for intra-operative surgical gesture rehearsal. With DejaVu we aim at bridging the gap between pre-operative surgical simulation and crucial but not yet robust intra-operative surgical augmented reality. By exploiting intra-operative images we produce a simulation that faithfully matches the actual procedure without visual discrepancies and with an underlying physical modelling that performs real-time deformation of organs and surrounding tissues, surgeons can interact with the targeted organs through grasping, pulling or cutting to immediately rehearse their next gesture. We present results on different in vivo surgical procedures and demonstrate the feasibility of practical use of our system.
- Accès au texte intégral et bibtex
-

-
- titre
- Silhouette-based Pose Estimation for Deformable Organs Application to Surgical Augmented Reality
- auteur
- Yinoussa Adagolodjo, Raffaella Trivisonne, Nazim Haouchine, Stéphane Cotin, Hadrien Courtecuisse, Yinoussa Adagolodjo
- article
- IROS 2017 - IEEE/RSJ International Conference on Intelligent Robots and Systems, Sep 2017, Vancouver, Canada
- resume
- — In this paper we introduce a method for semi-automatic registration of 3D deformable models using 2D shape outlines (silhouettes) extracted from a monocular camera view. Our framework is based on the combination of a biomechanical model of the organ with a set of projective constraints influencing the deformation of the model. To enforce convergence towards a global minimum for this ill-posed problem we interactively provide a rough (rigid) estimation of the pose. We show that our approach allows for the estimation of the non-rigid 3D pose while relying only on 2D information. The method is evaluated experimentally on a soft silicone gel model of a liver, as well as on real surgical data, providing augmented reality of the liver and the kidney using a monocular laparoscopic camera. Results show that the final elastic registration can be obtained in just a few seconds, thus remaining compatible with clinical constraints. We also evaluate the sensitivity of our approach according to both the initial alignment of the model and the silhouette length and shape.
- Accès au texte intégral et bibtex
-

-
- titre
- Image-driven Stochastic Identification of Boundary Conditions for Predictive Simulation
- auteur
- Igor Peterlik, Nazim Haouchine, Lukáš Ručka, Stéphane Cotin
- article
- 20th International Conference on Medical Image Computing and Computer Assisted Intervention, Sep 2017, Québec, Canada
- resume
- In computer-aided interventions, biomechanical models reconstructed from the pre-operative data are used via augmented reality to facilitate the intra-operative navigation. The predictive power of such models highly depends on the knowledge of boundary conditions. However , in the context of patient-specific modeling, neither the pre-operative nor the intra-operative modalities provide a reliable information about the location and mechanical properties of the organ attachments. We present a novel image-driven method for fast identification of boundary conditions which are modelled as stochastic parameters. The method employs the reduced-order unscented Kalman filter to transform in real-time the probability distributions of the parameters, given observations extracted from intra-operative images. The method is evaluated using synthetic, phantom and real data acquired in vivo on a porcine liver. A quantitative assessment is presented and it is shown that the method significantly increases the predictive power of the biomechanical model.
- Accès au texte intégral et bibtex
-

-
- titre
- Template-based Monocular 3D Recovery of Elastic Shapes using Lagrangian Multipliers
- auteur
- Nazim Haouchine, Stéphane Cotin
- article
- Computer Vision and Pattern Recognition (CVPR), Jul 2017, Honolulu, Hawai, United States. ⟨10.1109/CVPR.2017.381⟩
- resume
- We present in this paper an efficient template-based method for 3D recovery of elastic shapes from a fixed monocular camera. By exploiting the object's elasticity, in contrast to isometric methods that use inextensibility constraints , a large range of deformations can be handled. Our method is expressed as a saddle point problem using La-grangian multipliers resulting in a linear system which unifies both mechanical and optical constraints and integrates Dirichlet boundary conditions, whether they are fixed or free. We experimentally show that no prior knowledge on material properties is needed, which exhibit the generic usability of our method with elastic and inelastic objects with different kinds of materials. Comparisons with existing techniques are conducted on synthetic and real elastic objects with strains ranging from 25% to 130% resulting to low errors.
- Accès au texte intégral et bibtex
-

Poster communications
-
- titre
- Deformed Reality: Proof of concept and preliminary results
- auteur
- Nazim Haouchine, Antoine Petit, Frederick Roy, Stéphane Cotin
- article
- ISMAR 2017 - 16th IEEE International Symposium on Mixed and Augmented Reality, Oct 2017, Nantes, France. 2017
- resume
- We introduce " Deformed Reality " , a new paradigm to interactively manipulate objects in a scene in a deformable manner. Using the core principle of augmented reality to estimate rigid pose over time, our method enables the user to deform the targeted object while it is being rendered with its natural texture, giving the sense of a real-time object editing in user environment. The presented results show that our method can open new ways of using augmented reality by not only augmenting the scene but also interacting with it in a non-rigid manner.
- Accès au texte intégral et bibtex
-

2016
Journal articles
-
- titre
- Handling Topological Changes during Elastic Registration: Application to Augmented Reality in Laparoscopic Surgery
- auteur
- Christoph Joachim Paulus, Nazim Haouchine, Seong-Ho Kong, Renato Vianna Soares, David Cazier, Stéphane Cotin
- article
- International Journal of Computer Assisted Radiology and Surgery, 2016, 12, pp.461-470. ⟨10.1007/s11548-016-1502-4⟩
- resume
- Purpose: Locating the internal structures of an organ is a critical aspect of many surgical procedures. Minimally invasive surgery, associated with augmented reality techniques, offers the potential to visualize inner structures, allowing for improved analysis, depth perception or for supporting planning and decision systems. Methods: Most of the current methods dealing with rigid or non-rigid augmented reality make the assumption that the topology of the organ is not modified. As surgery relies essentially on cutting and dissection of anatomical structures, such methods are limited to the early stages of the surgery. We solve this shortcoming with the introduction of a method for physics-based elastic registration using a single view from a monocular camera. Singularities caused by topological changes are detected and propagated to the pre-operative model. This significantly improves the coherence between the actual laparoscopic view and the model, and provides added value in terms of navigation and decision-making, e.g. by overlaying the internal structures of an organ on the laparoscopic view. Results: Our real time augmentation method is assessed on several scenarios, using synthetic objects and real organs. In all cases, the impact of our approach is demonstrated, both qualitatively and quantitatively. Conclusion: The presented approach tackles the challenge of localizing internal structures throughout a complete surgical procedure, even after surgical cuts. This information is crucial for surgeons to improve the outcome for their surgical procedure and avoid complications.
- Accès au texte intégral et bibtex
-
-
- titre
- Robust Augmented Reality registration method for Localization of Solid Organs’ Tumors Using CT-derived Virtual Biomechanical Model and Fluorescent Fiducials
- auteur
- Seong-Ho Kong, Nazim Haouchine, Renato Soares, Andrey S Klymchenko, Bohdan Andreiuk, Bruno Marques, Galyna Shabat, Thierry Piéchaud, Michele Diana, Stéphane Cotin, Jacques Marescaux
- article
- Surgical Endoscopy, 2016, ⟨10.1007/s00464-016-5297-8⟩
- resume
- Accurate localization of solid organs tumors is crucial to ensure both radicality and organ function preservation. Augmented Reality (AR) is the fusion of computer-generated and real-time images. AR can be used in surgery as a navigation tool, by creating a patient-specific virtual model through 3D software manipulation of DICOM imaging (e.g. CT-scan). The virtual model can be superimposed to the real-time images to obtain the enhanced real-time localization. However, the 3D virtual model is rigid, and does not take into account inner structures’ deformations. We present a concept of automated navigation system, enabling transparency visualization of internal anatomy and tumor’s margins, while the organs undergo deformation during breathing or surgical manipulation.
- Accès au texte intégral et bibtex
-
-
- titre
- Retrieval of ocean subsurface particulate backscattering coefficient from space-borne CALIOP lidar measurements
- auteur
- Xiaomei Lu, Yongxiang Hu, Jacques Pelon, Charles Trepte, Katie Liu, Sharon Rodier, Shan Zeng, Patricia L. Lucker, Ron Verhappen, Jamie Wilson, Claude Audouy, Christophe Ferrier, Said Haouchine, Bill Hunt, Brian Getzewich
- article
- Optics Express, 2016, 24 (25), pp.29001-29008. ⟨10.1364/OE.24.029001⟩
- resume
- A new approach has been proposed to determine ocean subsurface particulate backscattering coefficient b
- Accès au texte intégral et bibtex
-

Conference papers
-
- titre
- Using Contours as Boundary Conditions for Elastic Registration during Minimally Invasive Hepatic Surgery
- auteur
- Nazim Haouchine, Frederick Roy, Lionel Untereiner, Stéphane Cotin
- article
- International Conference on Intelligent Robots and Systems, Oct 2016, Daejeon, South Korea
- resume
- We address in this paper the ill-posed problem of initial alignment of pre-operative to intra-operative data for augmented reality during minimally invasive hepatic surgery. This problem consists of finding the rigid transformation that relates the scanning reference and the endoscopic camera pose, and the non-rigid transformation undergone by the liver w.r.t its scanned state. Most of the state-of-the-art methods assume a known initial registration. Here, we propose a method that permits to recover the deformation undergone by the liver while simultaneously finding the rotational and translational parts of the transformation. Our formulation considers the boundaries of the liver with its surrounding tissues as hard constraints directly encoded in an energy minimization process. We performed experiments on real in-vivo data of human hepatic surgery and synthetic data, and compared our method with related works.
- Accès au texte intégral et bibtex
-

-
- titre
- Simultaneous Pose Estimation and Augmentation of Elastic Surfaces from a Moving Monocular Camera
- auteur
- Nazim Haouchine, Marie-Odile Berger, Stephane Cotin
- article
- International Symposium on Mixed and Augmented Reality, Sep 2016, Merida, Mexico. ⟨10.1109/ISMAR-Adjunct.2016.0076⟩
- resume
- We present in this paper an original method to estimate the pose of a monocular camera while simultaneously modeling and capturing the elastic deformation of the object to be augmented. Our method tackles a challenging problem where ambiguities between rigid motion and non-rigid deformation are present. This issue represents a major lock for the establishment of an efficient surgical augmented reality where endoscopic camera moves and organs deform. Using an underlying physical model to estimate the low stressed regions our algorithm separates the rigid body motion from the elastic deformations using polar decomposition of the strain tensor. Following this decomposition, a constrained minimization, that encodes both the optical and the physical constraints, is resolved at each frame. Results on real and simulated data are exposed to show the effectiveness of our approach.
- Accès au texte intégral et bibtex
-
-
- titre
- Segmentation and Labelling of Intra-operative Laparoscopic Images using Structure from Point Cloud
- auteur
- Nazim Haouchine, Stephane Cotin
- article
- International Symposium on Biomedical Imaging : "From Nano to Macro" (ISBI 2016), Apr 2016, Prague, Czech Republic
- resume
- We present in this paper an automatic method for segmenting and labelling of liver its surrounding tissues in intra-operative laparoscopic images. The goal is to be able to distinguished between the different structure that compose a common intra-operative hepatic surgery scene. This will permits to improve the registration between pre-operative data and intra-operative images for task such as Augmented Reality. Our segmentation method consider the scene as a 3D structured point cloud instead of a laparoscopic images in order to exploit powerful informations such as curvature and normals, in addition to visual cues that permits to efficiently classify the scene. Our approach works well on sparse and noisy point clouds, thanks to a surface approximation stage, and unlike existing approaches, is independent of organs texture in the image. Experiements performed on challenging human hepatic surgery confirm that accurate segmentation and labelling are possible using 3D structure information and appropriate visual cues.
- Accès au texte intégral et bibtex
-

2015
Journal articles
-
- titre
- Patient-specific Biomechanical Modeling for Guidance during Minimally-invasive Hepatic Surgery
- auteur
- Rosalie Plantefève, Igor Peterlik, Nazim Haouchine, Stéphane Cotin
- article
- Annals of Biomedical Engineering, 2015
- resume
- During the minimally-invasive liver surgery, only the partial surface view of the liver is usually provided to the surgeon via the laparoscopic camera. Therefore, it is necessary to estimate the actual position of the internal structures such as tumors and vessels from the pre-operative images. Nevertheless, such task can be highly challenging since during the intervention, the abdominal organs undergo important deformations due to the pneumoperitoneum, respiratory and cardiac motion and the interaction with the surgical tools. Therefore, a reliable automatic system for intra-operative guidance requires fast and reliable registration of the pre- and intra-operative data. In this paper we present a complete pipeline for the registration of pre-operative patient-specific image data to the sparse and incomplete intra-operative data. While the intra-operative data is represented by a point cloud extracted from the stereo-endoscopic images, the pre-operative data is used to reconstruct a biomechanical model which is necessary for accurate estimation of the position of the internal structures, considering the actual deformations. This model takes into account the patient-specific liver anatomy composed of parenchyma, vascularization and capsule, and is enriched with anatomical boundary conditions transferred from an atlas. The registration process employs the iterative closest point technique together with a penalty-based method. We perform a quantitative assessment based on the evaluation of the target registration error on synthetic data as well as a qualitative assessment on real patient data. We demonstrate that the proposed registration method provides good results in terms of both accuracy and robustness w. r. t. the quality of the intra-operative data.
- Accès au texte intégral et bibtex
-
-
- titre
- Impact of Soft Tissue Heterogeneity on Augmented Reality for Liver Surgery
- auteur
- Nazim Haouchine, Stephane Cotin, Igor Peterlik, Jeremie Dequidt, Mario Sanz Lopez, Erwan Kerrien, Marie-Odile Berger
- article
- IEEE Transactions on Visualization and Computer Graphics, 2015, 21 (5), pp.584 - 597. ⟨10.1109/TVCG.2014.2377772⟩
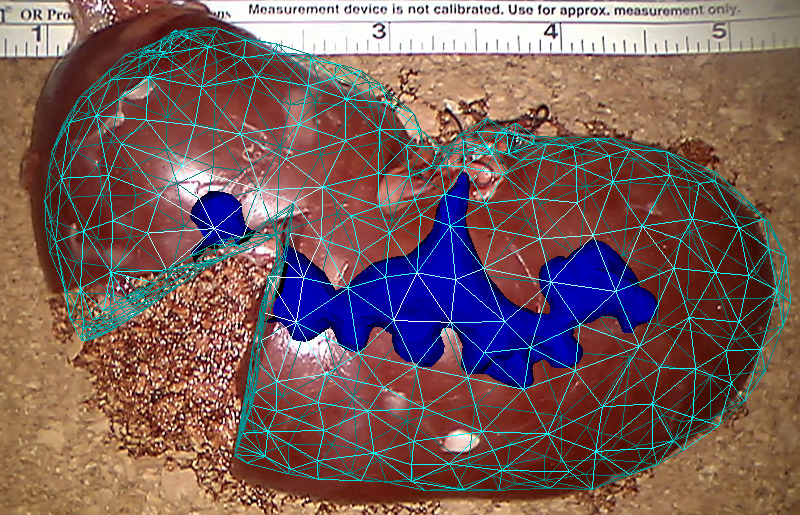
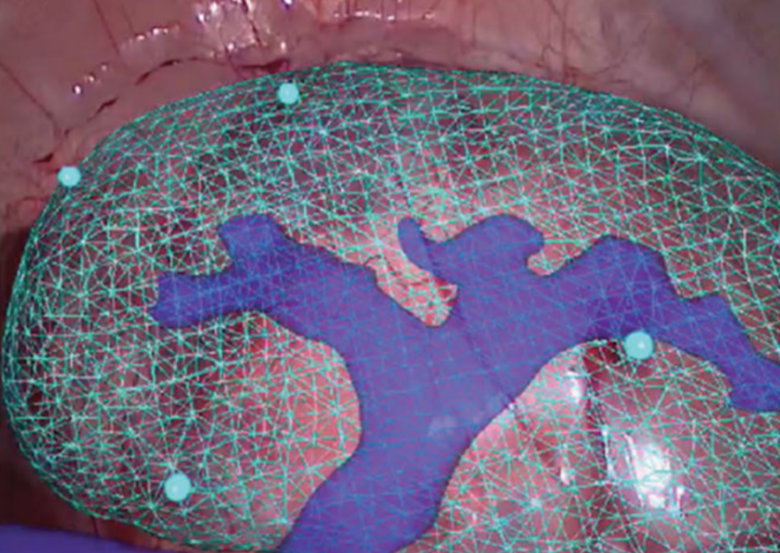
- resume
- This paper presents a method for real-time augmented reality of internal liver structures during minimally invasive hepatic surgery. Vessels and tumors computed from pre-operative CT scans can be overlaid onto the laparoscopic view for surgery guidance. Compared to current methods, our method is able to locate the in-depth positions of the tumors based on partial three-dimensional liver tissue motion using a real-time biomechanical model. This model permits to properly handle the motion of internal structures even in the case of anisotropic or heterogeneous tissues, as it is the case for the liver and many anatomical structures. Experimentations conducted on phantom liver permits to measure the accuracy of the augmentation while real-time augmentation on in vivo human liver during real surgery shows the benefits of such an approach for minimally invasive surgery.
- Accès au texte intégral et bibtex
-
-
- titre
- Case-based maintenance : Structuring and incrementing the Case.
- auteur
- Brigitte Morello, Mohamed Karim Haouchine, Noureddine Zerhouni
- article
- Knowledge-Based Systems, 2015, 88, pp.165-183. ⟨10.1016/j.knosys.2015.07.034⟩
- resume
- To avoid performance degradation and maintain the quality of results obtained by the case-based reasoning (CBR) systems, maintenance becomes necessary, especially for those systems designed to operate over long periods and which must handle large numbers of cases. CBR systems cannot be preserved without scanning the case base. For this reason, the latter must undergo maintenance operations. The techniques of case base’s dimension optimization is the analog of instance reduction size methodology (in the machine learning community). This study links these techniques by presenting case-based maintenance in the framework of instance based reduction, and provides: first an overview of CBM studies, second, a novel method of structuring and updating the case base and finally an application of industrial case is presented. The structuring combines a categorization algorithm with a measure of competence CM based on competence and performance criteria. Since the case base must progress over time through the addition of new cases, an auto-increment algorithm is installed in order to dynamically ensure the structuring and the quality of a case base. The proposed method was evaluated through a case base from an industrial plant. In addition, an experimental study of the competence and the performance was undertaken on reference benchmarks. This study showed that the proposed method gives better results than the best methods currently found in the literature.
- Accès au texte intégral et bibtex
-

-
- titre
- Monocular 3D Reconstruction and Augmentation of Elastic Surfaces with Self-occlusion Handling
- auteur
- Nazim Haouchine, Jeremie Dequidt, Marie-Odile Berger, Stephane Cotin
- article
- IEEE Transactions on Visualization and Computer Graphics, 2015, pp.14. ⟨10.1109/TVCG.2015.2452905⟩
- resume
- This paper focuses on the 3D shape recovery and augmented reality on elastic objects with self-occlusions handling, using only single view images. Shape recovery from a monocular video sequence is an underconstrained problem and many approaches have been proposed to enforce constraints and resolve the ambiguities. State-of-the art solutions enforce smoothness or geometric constraints, consider specific deformation properties such as inextensibility or resort to shading constraints. However, few of them can handle properly large elastic deformations. We propose in this paper a real-time method that uses a mechanical model and able to handle highly elastic objects. The problem is formulated as an energy minimization problem accounting for a non-linear elastic model constrained by external image points acquired from a monocular camera. This method prevents us from formulating restrictive assumptions and specific constraint terms in the minimization. In addition, we propose to handle self-occluded regions thanks to the ability of mechanical models to provide appropriate predictions of the shape. Our method is compared to existing techniques with experiments conducted on computer-generated and real data that show the effectiveness of recovering and augmenting 3D elastic objects. Additionally, experiments in the context of minimally invasive liver surgery are also provided and results on deformations with the presence of self-occlusions are exposed.
- Accès au texte intégral et bibtex
-
Conference papers
-
- titre
- Framework for augmented reality in Minimally Invasive laparoscopic surgery
- auteur
- Bruno Marques, Rosalie Plantefeve, Frédérick Roy, Nazim Haouchine, Emmanuel Jeanvoine, Igor Peterlik, Stéphane Cotin
- article
- HealthCom 2015, Oct 2015, Boston, United States. ⟨10.1109/HealthCom.2015.7454467⟩
- resume
- This article presents a framework for fusing pre-operative data and intra-operative data for surgery guidance. This framework is employed in the context of Minimally Invasive Surgery (MIS) of the liver. From stereoscopic images a three dimensional point cloud is reconstructed in real-time. This point cloud is then used to register a patient-specific biomechanical model derived from Computed Tomography images onto the laparoscopic view. In this way internal structures such as vessels and tumors can be visualized to help the surgeon during the procedure. This is particularly relevant since abdominal organs undergo large deformations in the course of the surgery, making it difficult for surgeons to correlate the laparoscopic view with the pre-operative images. Our method has the potential to reduce the duration of the operation as the biomechanical model makes it possible to estimate the in-depth position of tumors and vessels at any time of the surgery, which is essential to the surgical decision process. Results show that our method can be successfully applied during laparoscopic procedure without interfering with the surgical work flow.
- Accès au texte intégral et bibtex
-

-
- titre
- Surgical Augmented Reality with Topological Changes
- auteur
- Christoph J. Paulus, Nazim Haouchine, David Cazier, Stéphane Cotin
- article
- Medical Image Computing and Computer Assisted Interventions, Oct 2015, München, Germany
- resume
- The visualization of internal structures of organs in minimally invasive surgery is an important avenue for improving the perception of the surgeon, or for supporting planning and decision systems. However, current methods dealing with non-rigid augmented reality only provide augmentation when the topology of the organ is not modified. In this paper we solve this shortcoming by introducing a method for physics-based non-rigid augmented reality. Singularities caused by topo-logical changes are detected and propagated to the pre-operative model. This significantly improves the coherence between the actual laparascopic view and the model, and provides added value in terms of navigation and decision making. Our real time augmentation algorithm is assessed on a video showing the cut of a porcine liver's lobe in minimal invasive surgery.
- Accès au texte intégral et bibtex
-

-
- titre
- Surgical Augmented Reality with Topological Changes
- auteur
- Christoph Paulus, Nazim Haouchine, David Cazier, Stéphane Cotin
- article
- MICCAI 2015: Medical Image Computing and Computer-Assisted Intervention, Oct 2015, Munich, Germany. ⟨10.1007/978-3-319-24553-9_51⟩
- Accès au texte intégral et bibtex
-

-
- titre
- Augmented Reality during Cutting and Tearing of Deformable Objects
- auteur
- Christoph J. Paulus, Nazim Haouchine, David Cazier, Stephane Cotin
- article
- The 14th IEEE International Symposium on Mixed and Augmented Reality, Sep 2015, Fukuoka, Japan. pp.6
- resume
- Current methods dealing with non-rigid augmented reality only provide an augmented view when the topology of the tracked object is not modified, which is an important limitation. In this paper we solve this shortcoming by introducing a method for physics-based non-rigid augmented reality. Singularities caused by topological changes are detected by analyzing the displacement field of the underlying deformable model. These topological changes are then applied to the physics-based model to approximate the real cut. All these steps, from deformation to cutting simulation, are performed in real-time. This significantly improves the coherence between the actual view and the model, and provides added value.
- Accès au texte intégral et bibtex
-

-
- titre
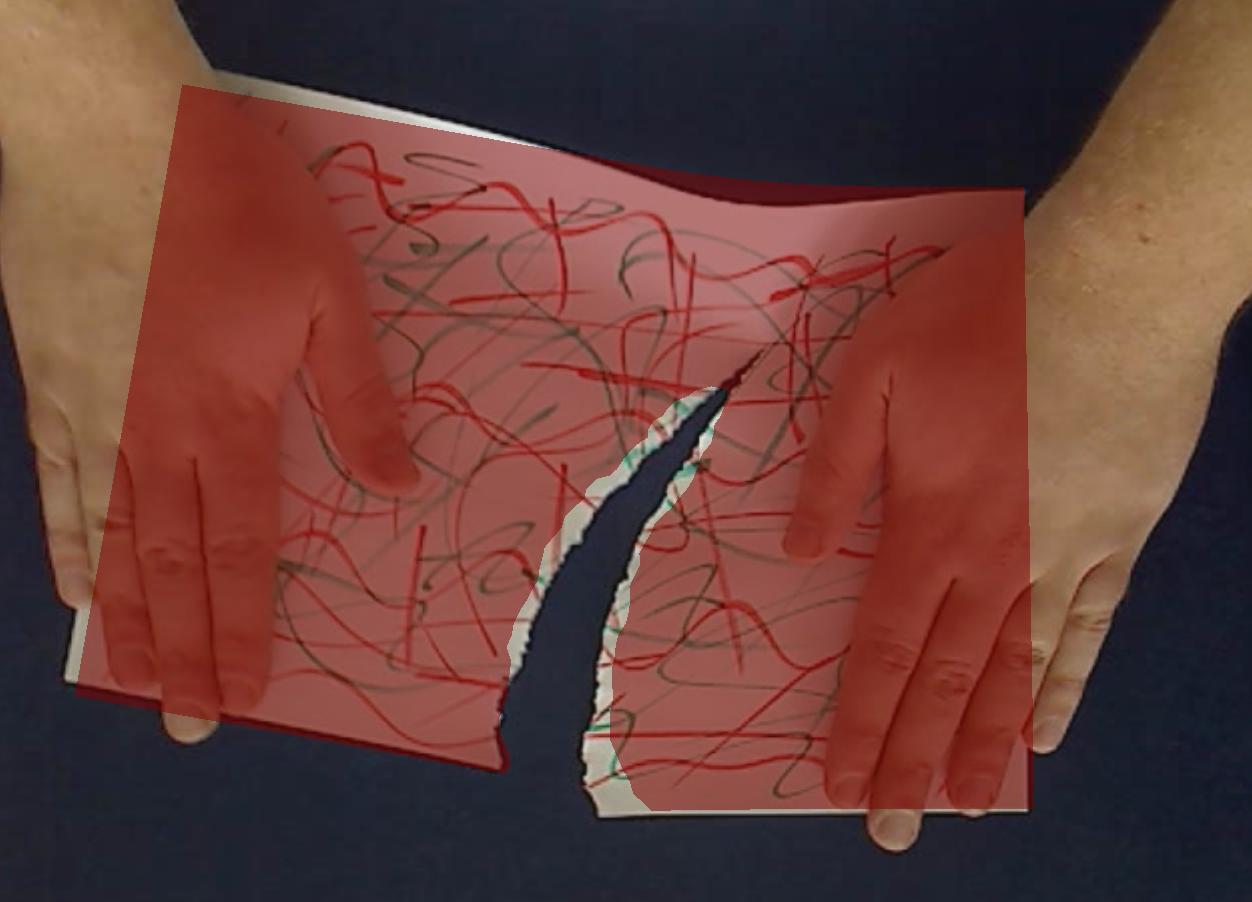
- Fracture in Augmented Reality
- auteur
- Nazim Haouchine, Alexandre Bilger, Jeremie Dequidt, Stephane Cotin
- article
- SIGGRAPH [Poster], Aug 2015, Los Angeles, United States
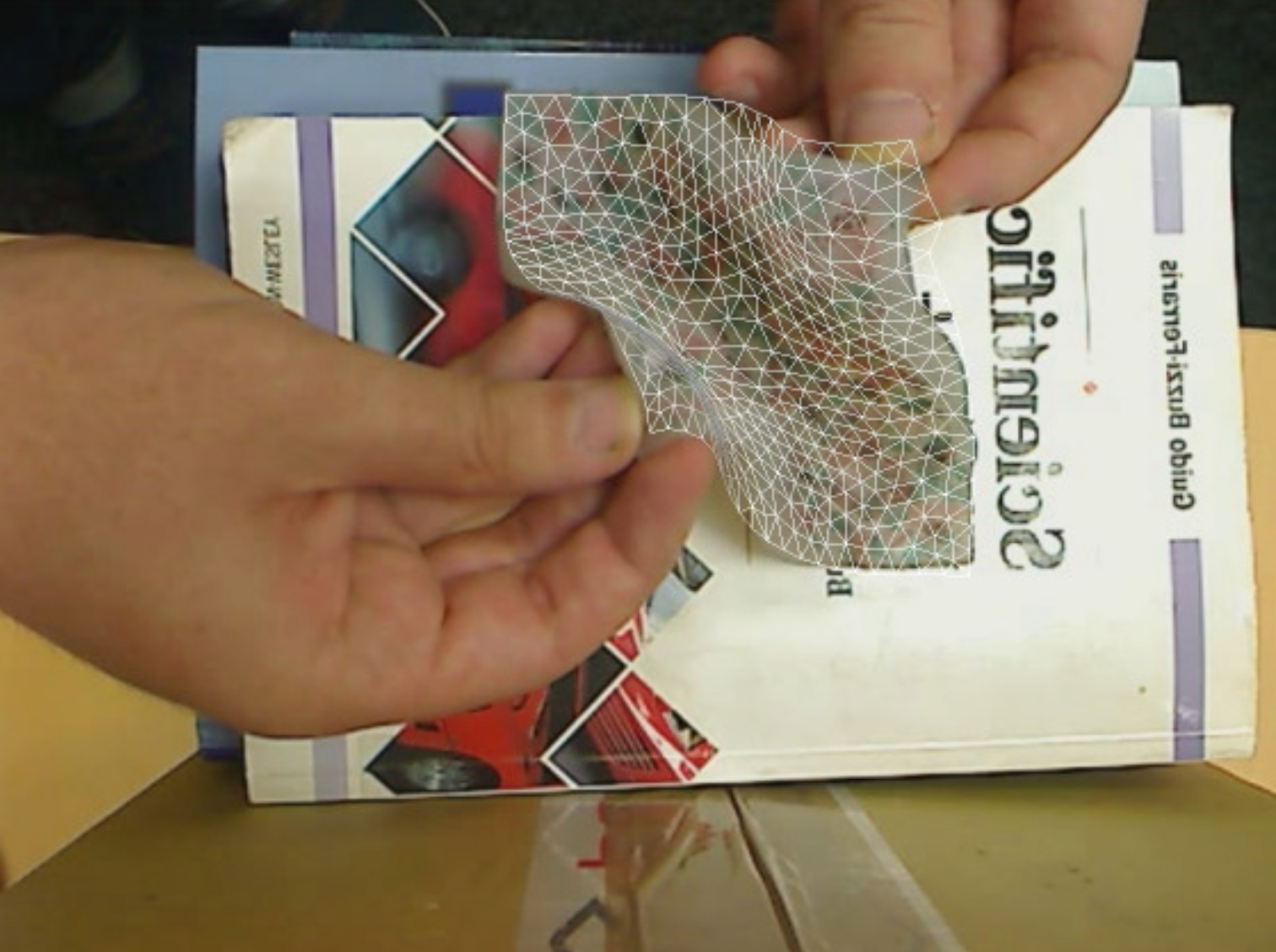
- resume
- We propose in this study an image-guided mesh cutting method to handle real-time augmentation of paper tearing. This method relies on the combination of visually-based fracture tracking algorithm and a physics-based model that is dynamically superimposed on the image.
- Accès au texte intégral et bibtex
-
-
- titre
- Improving depth perception during surgical augmented reality
- auteur
- Bruno Marques, Nazim Haouchine, Rosalie Plantefeve, Stephane Cotin
- article
- SIGGRAPH [Poster], Aug 2015, Los Angeles, United States. pp.Article No. 24, ⟨10.1145/2787626.2792654⟩
- resume
- This study suggests a method to compensate the loss of depth perception while enhancing organ vessels and tumors to surgeons. This method relies on a combination of contour rendering technique and adaptive alpha blending to effectively perceive the vessels and tumors depth. In addition, this technique is designed to achieve real-time to satisfy the requirements of clinical routines, and has been tested on real human surgery.
- Accès au texte intégral et bibtex
-
-
- titre
- Surgery Training, Planning and Guidance Using the SOFA Framework
- auteur
- Hugo Talbot, Nazim Haouchine, Igor Peterlik, Jeremie Dequidt, Christian Duriez, Hervé Delingette, Stephane Cotin
- article
- Eurographics, May 2015, Zurich, Switzerland
- resume
- In recent years, an active development of novel technologies dealing with medical training, planning and guidance has become an increasingly important area of interest in both research and health-care manufacturing. A combination of advanced physical models, realistic human-computer interaction and growing computational power is bringing new solutions in order to help both medical students and experts to achieve a higher degree of accuracy and reliability in surgical interventions. In this paper, we present three different examples of medical physically-based simulations implemented in a common software platform called SOFA. Each example represents a different application: training for cardiac electrophysiology, pre-operative planning of cryosurgery and per-operative guidance for laparoscopy. The goal of this presentation is to evaluate the realism, accuracy and efficiency of the simulations, as well as to demonstrate the potential and flexibility of the SOFA platform.
- Accès au texte intégral et bibtex
-
Theses
-
- titre
- Image-guided Simulation for Augmented Reality during Hepatic Surgery
- auteur
- Nazim Haouchine
- article
- Computer Science [cs]. Université de Lille1, 2015. English. ⟨NNT : ⟩
- resume
- The main objective of this thesis is to provide surgeons with tools for pre and intra-operative decision support during minimally invasive hepatic surgery. These interventions are usually based on laparoscopic techniques or, more recently, flexible endoscopy. During such operations, the surgeon tries to remove a significant number of liver tumors while preserving the functional role of the liver. This involves defining an optimal hepatectomy, i.e. ensuring that the volume of post-operative liver is at least at 55% of the original liver and the preserving at hepatic vasculature. Although intervention planning can now be considered on the basis of preoperative patient-specific, significant movements of the liver and its deformations during surgery data make this very difficult to use planning in practice. The work proposed in this thesis aims to provide augmented reality tools to be used in intra-operative conditions in order to visualize the position of tumors and hepatic vascular networks at any time.
- Accès au texte intégral et bibtex
-

2014
Conference papers
-
- titre
- Automatic Alignment of pre and intraoperative Data using Anatomical Landmarks for Augmented Laparoscopic Liver Surgery
- auteur
- Rosalie Plantefeve, Nazim Haouchine, Jean Pierre Radoux, Stéphane Cotin
- article
- International Symposium on Biomedical Simulation ISBMS, Oct 2014, Strasbourg, France
- resume
- Each year in Europe 50,000 new liver cancer cases are diagnosed for which hepatic surgery combined to chemotherapy is the most common treatment. In particular the number of laparoscopic liver surgeries has increased significantly over the past years. This type of minimally invasive procedure which presents many benefits for the patient is challenging for the surgeons due to the limited field of view. Recently new augmented reality techniques which merge preoperative data and intraoperative images and permit to visualize internal structures have been proposed to help surgeons during this type of surgery. One of the difficulties is to align preoperative data with the intraoperative images. We propose in this paper a semi-automatic approach for solving the ill-posed problem of initial alignment for Augmented Reality systems during liver surgery. Our registration method relies on anatomical landmarks extracted from both the laparoscopic images and three-dimensional model, using an image-based soft-tissue reconstruction technique and an atlas-based approach, respectively. The registration evolves automatically from a quasi-rigid to a non-rigid registration. Furthermore, the surface-driven deformation is induced in the volume via a patient specific biomechanical model. The experiments conducted on both synthetic and in vivo data show promising results with a registration error of 2 mm when dealing with a visible surface of 30% of the whole liver.
- Accès au texte intégral et bibtex
-
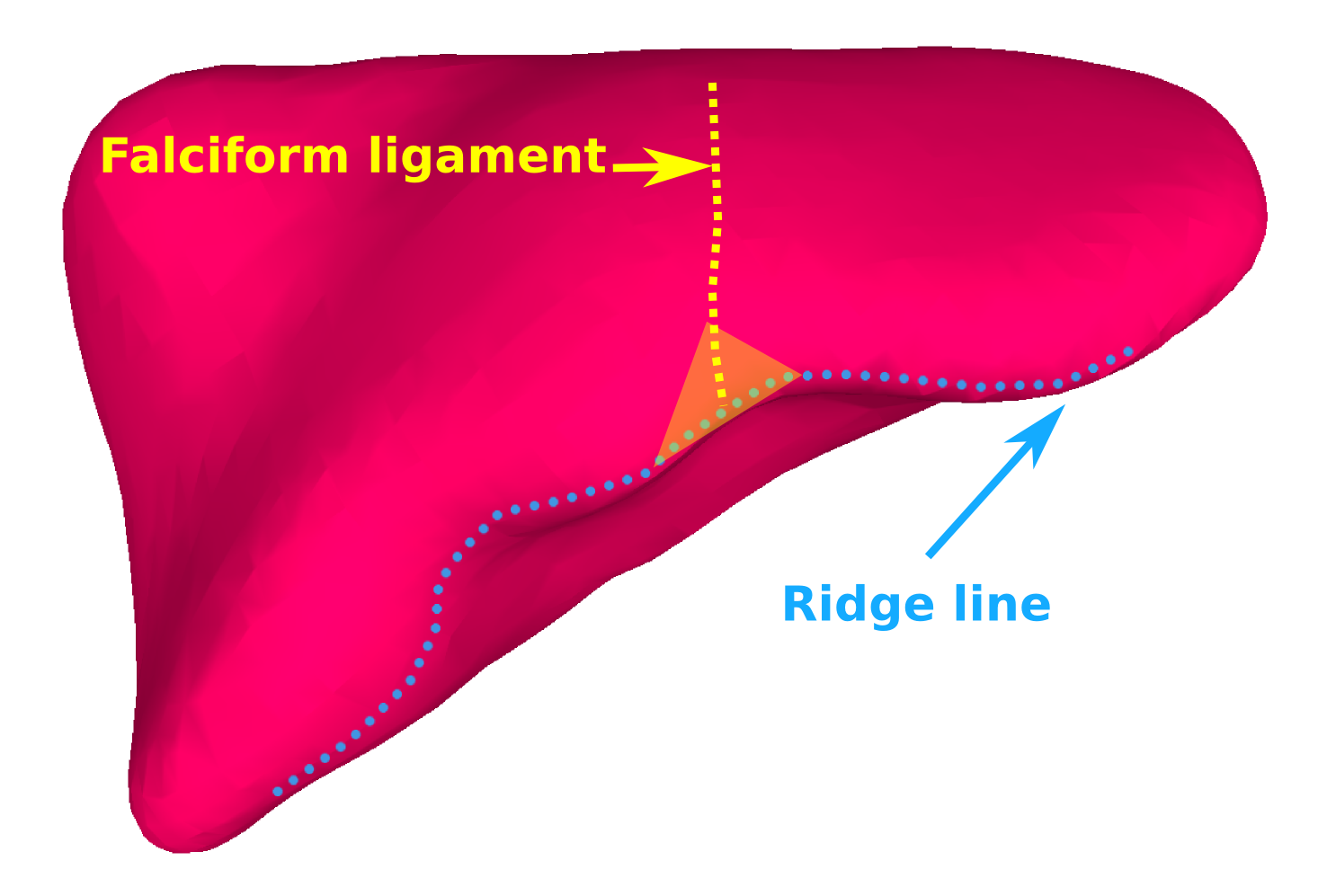
-
- titre
- The Role of Ligaments: Patient-Specific or Scenario-Specific ?
- auteur
- Julien Bosman, Nazim Haouchine, Jérémie Dequidt, Igor Peterlik, Stéphane Cotin, Christian Duriez
- article
- International Symposium on Biomedical Simulation ISBMS, Oct 2014, Strasbourg, France
- resume
- In this paper, we present a preliminary study dealing with the importance of correct modeling of connective tissues such as ligaments in laparoscopic liver surgery simulation. We show that the model of these tissues has a significant impact on the overall results of the simulation. This is demonstrated numerically using two different scenarios from the laparoscopic liver surgery, both resulting in important deformation of the liver: insufflation of the abdominal cavity with gas (pneumoperitoneum) and manipulation with the liver lobe using a surgical instrument (grasping pincers). For each scenario, a series of simulations is performed with or without modeling the deformation of the ligaments (fixed constraints or biomechanical model with the parameter of the literature). The numerical comparison shows that modeling the ligament deformations can be at least as important as the correct selection of the patient-specific parameters, nevertheless this observation depends on the simulated scenario.
- Accès au texte intégral et bibtex
-

-
- titre
- Single View Augmentation of 3D Elastic Objects
- auteur
- Nazim Haouchine, Jérémie Dequidt, Marie-Odile Berger, Stéphane Cotin
- article
- International Symposium on Mixed and Augmented Reality - ISMAR, Sep 2014, Munich, Germany
- resume
- This paper proposes an efficient method to capture and augment highly elastic objects from a single view. 3D shape recovery from a monocular video sequence is an underconstrained problem and many approaches have been proposed to enforce constraints and resolve the ambiguities. State-of-the art solutions enforce smoothness or geometric constraints, consider specific deformation properties such as inextensibility or ressort to shading constraints. However, few of them can handle properly large elastic deformations. We propose in this paper a real-time method which makes use of a me chanical model and is able to handle highly elastic objects. Our method is formulated as a energy minimization problem accounting for a non-linear elastic model constrained by external image points acquired from a monocular camera. This method prevents us from formulating restrictive assumptions and specific constraint terms in the minimization. The only parameter involved in the method is the Young's modulus where we show in experiments that a rough estimate of its value is sufficient to obtain a good reconstruction. Our method is compared to existing techniques with experiments conducted on computer-generated and real data that show the effectiveness of our approach. Experiments in the context of minimally invasive liver surgery are also provided.
- Accès au texte intégral et bibtex
-

-
- titre
- Réalité augmentée pour la chirurgie minimalement invasive du foie utilisant un modèle biomécanique guidé par l'image
- auteur
- Nazim Haouchine, Stéphane Cotin, Jérémie Dequidt, Erwan Kerrien, Marie-Odile Berger
- article
- Reconnaissance de Formes et Intelligence Artificielle (RFIA) 2014, Jun 2014, Rouen, France
- resume
- Cet article présente une méthode de réalité augmentée pour la chirurgie minimalement invasive du foie. Le réseau vasculaire et les tumeurs internes reconstruites à partir des données pré-opératoires (IRM ou CT) peuvent ainsi être visualisées dans l'image laparoscopique afin de guider les gestes du chirurgien pendant l'opération. Cette méthode est capable de propager les déformations 3D de la surface du foie à ses structures internes grâce à un modèle biomécanique sous-jacent qui prend en compte l'anisotropie et l'hétérogénéité du tissu hépatique. Des résultats sont montrés sur une vidéo in-vivo d'un foie humain acquise pendant une opération et sur un foie en silicone.
- Accès au texte intégral et bibtex
-

-
- titre
- Towards an Accurate Tracking of Liver Tumors for Augmented Reality in Robotic Assisted Surgery
- auteur
- Nazim Haouchine, Jérémie Dequidt, Igor Peterlik, Erwan Kerrien, Marie-Odile Berger, Stéphane Cotin
- article
- International Conference on Robotics and Automation (ICRA), Jun 2014, Hong Kong, China
- resume
- This article introduces a method for tracking the internal structures of the liver during robot-assisted procedures. Vascular network, tumors and cut planes, computed from pre-operative data, can be overlaid onto the laparoscopic view for image-guidance, even in the case of large motion or deformation of the organ. Compared to current methods, our method is able to precisely propagate surface motion to the internal structures. This is made possible by relying on a fast yet accurate biomechanical model of the liver combined with a robust visual tracking approach designed to properly constrain the model. Augmentation results are demonstrated on in-vivo sequences of a human liver during robotic surgery, while quantitative validation is performed on an ex-vivo porcine liver experimentation. Validation results show that our approach gives an accurate surface registration with an error of less than 6mm on the position of the tumor.
- Accès au texte intégral et bibtex
-

2013
Journal articles
-
- titre
- Deformation-based Augmented Reality for Hepatic Surgery
- auteur
- Nazim Haouchine, Jérémie Dequidt, Marie-Odile Berger, Stéphane Cotin
- article
- Studies in Health Technology and Informatics, 2013, 184
- resume
- In this paper we introduce a method for augmenting the laparoscopic view during hepatic tumor resection. Using augmented reality techniques, vessels, tumors and cutting planes computed from pre-operative data can be overlaid onto the laparoscopic video. Compared to current techniques, which are limited to a rigid registration of the pre-operative liver anatomy with the intra-operative image, we propose a real-time, physics-based, non-rigid registration. The main strength of our approach is that the deformable model can also be used to regularize the data extracted from the computer vision algorithms. We show preliminary results on a video sequence which clearly highlights the interest of using physics-based model for elastic registration.
- Accès au texte intégral et bibtex
-

-
- titre
- Reutilization of diagnostic cases by adaptation of knowledge models.
- auteur
- Brigitte Chebel-Morello, Mohamed Karim Haouchine, Noureddine Zerhouni
- article
- Engineering Applications of Artificial Intelligence, 2013, 26, pp.2559-2573. ⟨10.1016/j.engappai.2013.05.001⟩
- resume
- This paper deals with design of knowledge oriented diagnostic system. Two challenges are addressed. The first one concerns the elicitation of expert practice and the proposition of a methodology for developing four knowledge containers of case based reasoning system. The second one concerns the proposition of a general adaptation phase to reuse case solving diagnostic problems in a different context. In most cases, adaptation methods are application-specific and the challenge in this work is to make a general adaptation method for the field of industrial diagnostics applications. This paper is a contribution to fill this gap in the field of fault diagnostic and repair assistance of equipment. The proposed adaptation algorithm relies on hierarchy descriptors, an implied context model and dependencies between problems and solutions of the source cases. In addition, one can note that the first retrieved case is not necessarily the most adaptable case, and to take into account this report, an adaptation-guided retrieval step based on a similarity measure associated with an adaptation measure is realized on the diagnostic problem. These two measures allow selecting the most adaptable case among the retrieved cases. The two retrieval and adaptation phases are applied on real industrial system called Supervised industrial system of Transfer of pallets (SISTRE).
- Accès au texte intégral et bibtex
-

Conference papers
-
- titre
- Image-guided Simulation of Heterogeneous Tissue Deformation For Augmented Reality during Hepatic Surgery
- auteur
- Nazim Haouchine, Jérémie Dequidt, Igor Peterlik, Erwan Kerrien, Marie-Odile Berger, Stéphane Cotin
- article
- ISMAR - IEEE International Symposium on Mixed and Augmented Reality 2013, Oct 2013, Adelaide, Australia
- resume
- This paper presents a method for real-time augmentation of vas- cular network and tumors during minimally invasive liver surgery. Internal structures computed from pre-operative CT scans can be overlaid onto the laparoscopic view for surgery guidance. Com- pared to state-of-the-art methods, our method uses a real-time biomechanical model to compute a volumetric displacement field from partial three-dimensional liver surface motion. This permits to properly handle the motion of internal structures even in the case of anisotropic or heterogeneous tissues, as it is the case for the liver and many anatomical structures. Real-time augmentation results are presented on in vivo and ex vivo data and illustrate the benefits of such an approach for minimally invasive surgery.
- Accès au texte intégral et bibtex
-

2012
Journal articles
- titre
- Carbapenemase-producing Acinetobacter baumannii in two university hospitals in Algeria
- auteur
- Sofiane Bakour, Marie Kempf, Abdelaziz Touati, Abdennour Ameur, Djamila Haouchine, Farida Sahli, Jean-Marc Rolain
- article
- Journal of Medical Microbiology, 2012, 61 (9), pp.1341 - 1343. ⟨10.1099/jmm.0.045807-0⟩
- Accès au bibtex
-
Conference papers
-
- titre
- Physics-based Augmented Reality for 3D Deformable Object
- auteur
- Nazim Haouchine, Jérémie Dequidt, Erwan Kerrien, Marie-Odile Berger, Stéphane Cotin
- article
- Eurographics Workshop on Virtual Reality Interaction and Physical Simulation, Dec 2012, Darmstadt, Germany
- resume
- This paper introduces an original method to perform augmented or mixed reality on deformable objects. Compared to state-of-the-art techniques, our method is able to track deformations of volumetric objects and not only surfacic objects. A flexible framework that relies on the combination of a 3D motion estimation and a physics-based deformable model used as a regularization and interpolation step allows to perform a non-rigid and robust registration. Results are exposed, based on computer-generated datasets and video sequences of real environments in order to assess the relevance of our approach.
- Accès au texte intégral et bibtex
-

2010
Journal articles
-
- titre
- Cartographie de la recharge potentielle des aquifères en zone aride
- auteur
- Abdelhamid Haouchine, Boudoukha Abderrahmane, Fatima Zohra Haouchine, Rachid Nedjaï
- article
- EUROJOURNALS, 2010, 45 (4), pp.1-13
- resume
- Dans les zones arides où les précipitations se trouvent en dessous de l'isohyète 200, et devant la quasi inexistence de ressources hydriques superficielles, l'exploitation des eaux souterraines reste le seul moyen pour parvenir à la satisfaction des divers besoins. RESUME Afin d'assurer la pérennité de cette ressource qui devient de plus en plus rare devant l'augmentation des sollicitations, il est impératif d'asseoir une gestion adéquate. Dans cette optique, la connaissance du taux de recharge des nappes aquifères est d'un intérêt particulier dans toute étude de quantification et de gestion. Cet article constitue une contribution à la détermination de la recharge potentielle des aquifères. La méthodologie proposée est une approche cartographique du phénomène, à partir de l'analyse des facteurs majeurs régissant l'infiltration dans ces zones. L'analyse s'est appuyée sur l'utilisation d'un Système d'Informations Géographiques et a été rendue possible grâce à l'élaboration des différentes couches de données spatialisées descriptives de ces différents facteurs. Ce travail a permis la classification de la zone d'étude (plaine d'El Outaya, Wilaya de Biskra, Algérie) en cinq niveaux descriptifs quant au taux de recharge, révélant un zoning des valeurs allant de 0.02% à 16.25% des précipitations, permettant ainsi une recharge globale de 30mm/an.
- Accès au texte intégral et bibtex
-

- titre
- Laboratory-based surveillance for Cryptosporidium in France, 2006-2009.
- auteur
- Karine Guyot, Francis Derouin, Patrice Agnamey, Adela Angoulvant, D. Aubert, C. Aznar, Didier Basset, Pascal Beaudeau, G. Belkadi, A. Berry, Alain Bonnin, Françoise Botterel, M.-E. Bougnoux, Patrice Bourée, Pierre Buffet, M. Cambon, Bernard Carme, Gabriela Certad, C. Chartier, B. Couprie, Frédéric Dalle, E. Dannaoui, Marie-Laure Dardé, E. Dei Cas, B. Degeilh, Nicole Desbois, Jean-Marc Dewitte, C. Duhamel, T.H. Duong, J. Dupouy-Camet, Alexandra Faussart, L. Favennec, Pierre Flori, N. Gantois, G. Gargala, Frédéric Grenouillet, Ml Grillot, D. Haouchine, Sandrine Houzé
- article
- Eurosurveillance, 2010, 15 (33), pp.19642. ⟨10.2807/ese.15.33.19642-en⟩
- resume
- In 2002, the French Food Safety Agency drew attention to the lack of information on the prevalence of human cryptosporidiosis in the country. Two years later, the ANOFEL Cryptosporidium National Network (ACNN) was set up to provide public health authorities with data on the incidence and epidemiology of human cryptosporidiosis in France. Constituted on a voluntary basis, ACNN includes 38 hospital parasitology laboratories (mainly in university hospitals). Each laboratory is engaged to notify new cases of confirmed human cryptosporidiosis, store specimens (e.g. stools, duodenal aspirates or biopsies) and related clinical and epidemiological data, using data sheet forms. From January 2006 to December 2009, 407 cryptosporidiosis cases were notified in France and 364 specimens were collected. Of the notified cases, 74 were children under four years of age, accounting for 18.2%. HIV-infected and immunocompetent patients represented 38.6% (n=157) and 28% (n=114) of cases, respectively. A marked seasonal pattern was observed each year, with increased number of cases in mid to late summer and the beginning of autumn. Genotyping of 345 isolates from 310 patients identified C. parvumin 168 (54.2%) cases, C. hominis in 113 (36.4%) and other species in 29 (9.4%), including C. felis (n=15), C. meleagridis (n=4), C. canis (n=4), Cryptosporidium chipmunk genotype (n=1), Cryptosporidium rabbit genotype (n=1) and new Cryptosporidium genotypes (n=4). These data represent the first multisite report of laboratory-confirmed cases of cryptosporidiosis in France.
- Accès au bibtex
-
2009
Conference papers
-
- titre
- A methodology to conceive a case based system of industrial diagnosis.
- auteur
- Brigitte Chebel-Morello, Mohamed-Karim Haouchine, Noureddine Zerhouni
- article
- World Congress of Engineering Asset Management, WCEAM'09., Sep 2009, Athènes, Greece. pp.474-486
- resume
- The objective of this paper is to address the diagnosis knowledge-oriented system in terms of artificial intelligence, particular by the Case-Based Reasoning (CBR) approach. Indeed, the use of CBR, which is an approach to problem solving and learning, in diagnosis goes back to a long time with the appearance of diagnostic support systems based on CBR. A diagnostic system by CBR implements an expertise-base composed of past experiences through which the origins of failure and the maintenance strategy are given according to a description of a specific situation of diagnostic. A study is made on the different diagnostic systems based on CBR. This study showed that there was no common methodology for building a CBR system. This design depends primarily on the case representation and knowledge models of the domain application. Consequently, this paper proposes a general design approach of a diagnostic system based on the CBR approach.
- Accès au texte intégral et bibtex
-

-
- titre
- Auto-increment of expertise for failure diagnostic.
- auteur
- Mohamed-Karim Haouchine, Brigitte Chebel-Morello, Noureddine Zerhouni
- article
- 13th IFAC Symposium on Information Control Problems in Manufacturing, INCOM'09., Jun 2009, Moscou, Russia. pp.367-372
- resume
- We have developed a diagnostic help system dedicated to the maintenance of a supervised industrial system for pallets Transfer (SISTRE). This diagnostic help system is based on a Case-Based Reasoning approach (CBR). The expertise considered in this help system and formalized in the case form in a case-base must be updated, while taking account of its quality. In this objective we propose a method allowing on one hand to structure the case-base and on the other hand to auto-increment it. An experimental study is undertaken through references benchmarks as well as an application on SISTRE.
- Accès au texte intégral et bibtex
-

Theses
-
- titre
- Adaptation-guided retrieval and maintenance of industrial diagnostic systems by the case-based reasoning approach.
- auteur
- Mohamed Karim Haouchine
- article
- Automatique / Robotique. Université de Franche-Comté, 2009. Français. ⟨NNT : ⟩
- resume
- The development of new technologies of the various products and components made the nature of systems more and more complex. This complexity is reverberated on the good functioning of the equipment with the appearance of new failures and the increasing involved costs. Maintenance became an indispensable element to maintain any equipment in operational condition regardless of its nature. In this context we are interested in corrective maintenance and more particularly in fault diagnostic of the industrial equipment. We have developed a method based on case-based reasoning (CBR), this latter being widely used in the industrial diagnostic domain. The CBR is an approach for problem solving and learning. In diagnostic, several CBR systems, ranging from classification problems “casebase mining” to knowledge-based systems, have proven their effectiveness. We have deployed in the first type of system a method insuring its maintenance where the case formalization is trivial. The whole system's maintenance requires the maintenance of the case-base which represents the heart of CBR systems. This method of maintenance is composed of a structuring step and an auto-increment step of the case-base, both aim at ensuring the quality of the system throughout its evolution. As for the second type of system, we have implemented a system which relies on knowledge models associated with different handling phases of the CBR cycle. We have proposed an adaptation-guided retrieval method based on two measures, one of similarity and one of adaptation, and an adaptation algorithm dedicated to the industrial diagnostic field. Our proposals have been implemented and validated on a GaMA-Frame (Global asset MAintenance) e-maintenance platform. This platform integrates our CBR diagnostic module and different knowledge models to diagnose faults on SISTRE (Supervised Industrial System of pallets TRansfEr) equipment.
- Accès au texte intégral et bibtex
-

2008
Conference papers
-
- titre
- Competence-Preserving Case-Deletion Strategy for Case-Base Maintenance.
- auteur
- Mohamed-Karim Haouchine, Brigitte Chebel-Morello, Noureddine Zerhouni
- article
- ECCBR'08, Sep 2008, Trier, Germany. pp.171-184
- resume
- The main goal of a Case-Based Reasoning (CBR) system is to provide criteria for evaluating the internal behavior and task efficiency of a particular system for a given initial case base and sequence of a solved problems. The choice of Case Base Maintenance (CBM) strategies is driven by the maintainer's performance goals for the system and by constraints on the system's design and the task environment. This paper gives an overview of CBM works and proposes a case deletion strategy based on a competence criterion using a novel approach. The proposed method combines an algorithm with a Competence Metric (CM). Series of tests are conducted using four standard data-sets as well as a locally constructed one, on which, three case base maintenance approaches will be tested and evaluated by competence and performance criteria. Thereafter competence and performance experimental study shows how this method compares favorably to more traditional methods.
- Accès au texte intégral et bibtex
-

-
- titre
- Adaptation-Guided retrieval for a diagnostic and repair help system dedicated to a pallets transfer.
- auteur
- Mohamed-Karim Haouchine, Brigitte Chebel-Morello, Noureddine Zerhouni
- article
- ECCBR'08., Sep 2008, Trier, Germany. pp.33-42
- resume
- In this paper, we describe a CBR approach for failure diagnosis of a pallets transfer. Adaptation phase is the key problem of the case-based reasoning system conception. This paper is a contribution to fill this gap in the equipments diagnostic and repair help. Retrieval step guided by adaptation is proposed, as a result measures associated with an adaptation measure are proposed. These two measures will make it possible to select among the retrieved cases the most adaptable case. Then, an adaptation algorithm is proposed and will rely on a descriptors hierarchy, a context model as well as the dependences between problem and solution of the source cases. A feasibility study of the proposed algorithm is made on a real industrial diagnosis case. Three scenarios are treated in this study concerning various dependency relation values and belonging to the hierarchical classes of descriptors.
- Accès au texte intégral et bibtex
-

-
- titre
- Algorithme d'adaptation pour le diagnostic technique.
- auteur
- Mohamed-Karim Haouchine, Brigitte Chebel-Morello, Noureddine Zerhouni
- article
- 16ème Atelier de Raisonnement à Partir de Cas., Apr 2008, Nancy, France. pp.79-91
- resume
- Cet article présente un algorithme d'adaptation en raisonnement à partir de cas appliqué au diagnostic technique. La phase d'adaptation est considérée dans quelques travaux comme le coeur du processus du raisonnement à partir de cas. Il y a plusieurs axes de recherche concernant cette phase, nous nous intéressons aux démarches unificatrices. Dans ce cadre, nous proposons un algorithme d'adaptation pour le diagnostic technique traitant des cas ayant des valeurs de descripteurs modales. Cet algorithme prend appui sur la hiérarchie des descripteurs, leurs contextes ainsi que les dépendances entre le problème et la solution des cas sources. Une étude de la faisabilité de notre algorithme est faite sur un cas réel de diagnostic industriel. Trois cas de figures sont traités dans cette étude concernant les différentes valeurs des relations de dépendances et de l'appartenance aux classes hiérarchiques des descripteurs.
- Accès au texte intégral et bibtex
-

2007
Conference papers
-
- titre
- Auto-incrémentation d'une base dysfonctionnelle de cas pour un système d'aide au diagnostic et à la réparation.
- auteur
- Brigitte Chebel-Morello, Mohamed-Karim Haouchine, Noureddine Zerhouni
- article
- 3ème Edition du Colloque International Francophone sur la Performance et les Nouvelles Technologies en Maintenance, PENTOM'2007., Jul 2007, Mons, Belgique. sur CD ROM - 22 p
- resume
- Le raisonnement à partir de cas est une méthode d'intelligence artificielle largement utilisée dans la résolution de problème de diagnostic technique. Après avoir mis en place un système de diagnostic et de réparation dédié à un système de transfert de palette, nous nous sommes intéressés à la maintenance de ce système et tout particulièrement à l'optimisation de la base de cas qui est au coeur du système et à sa remise à jour. Nous proposons dans cet article dans un premier temps d'optimiser la base de cas d'un système de raisonnement à partir de cas dédié au diagnostic de pannes et dans un deuxième temps d'enrichir la connaissance de ce système en rejoutant des cas de diagnostic non recensés d'une manière dynamique, sans altérer la structure de la base de cas mise en place. Ces 2 propositions ont été mises en place sur une plateforme de e-maintenance.
- Accès au texte intégral et bibtex
-

-
- titre
- Evolution d'un système de raisonnement à partir de cas dédié au diagnostic industriel.
- auteur
- Mohamed-Karim Haouchine, Brigitte Chebel-Morello, Noureddine Zerhouni
- article
- 15ème Atelier de Raisonnement à Partir de Cas, RàPC'2007., Jul 2007, Grenoble, France. pp.27-39
- resume
- A partir de la démarche de conception d'un système de diagnostic définie par une base de cas et des modèles de connaissances générales, nous élaborons une base de cas constituée de prototypes d'expériences qui prenant appui sur les modèles de connaissances et de règles de décision, permet de réduire considérablement la base de cas initiale. Puis l'évolution de ce système de diagnostic est étudiée lorsque de nouveaux dysfonctionnements apparaissent sur l'équipement ou bien quand l'équipement est amené à évoluer suivant des spécifications de maintenance améliorative. Cette évolution aura des répercussions aussi bien sur la base de cas que sur les modèles du système. Nous proposons des étapes d'évolution du système ainsi qu'un algorithme d'insertion d'un nouveau cas dysfonctionnel dans la base de cas sans remettre en cause la qualité de la base. Cet algorithme exploite deux notions à savoir le recouvrement et l'atteignabilité.
- Accès au texte intégral et bibtex
-

-
- titre
- Case Base Maintenance Approach.
- auteur
- Mohamed-Karim Haouchine, Brigitte Chebel-Morello, Noureddine Zerhouni
- article
- International Conference on Industrial Engineering and Systems Management, IESM'2007., Jun 2007, Beijing, China. sur CD ROM - 10 p
- resume
- Case base Maintenance is an active Case Based Reasoning research area. The main stream focuses on the method for reducing the size of the case-base while maintaining case-base competence. This paper gives an overview of these works, and proposes a case deletion strategy based on competence criteria using a novel approach. The proposed method, even if inspired from existing literature, combines an algorithm with a Competence Metric (CM). A series of tests are conducted using two standards data-sets as well as a locally constructed one, on which, three Case Base Maintenance approaches were tested. This experimental study shows how this technique compares favourably to more traditional strategies across two standard data-sets.
- Accès au texte intégral et bibtex
-

2006
Conference papers
-
- titre
- Maintenance d'un système de raisonnement à partir de cas.
- auteur
- Mohamed-Karim Haouchine, Brigitte Chebel-Morello, Noureddine Zerhouni
- article
- International Conference on Control, Modelling and Diagnosis, ICCMD'06., May 2006, Université Badji Mokhtar, Annaba., Algérie. 6 p
- resume
- La maintenance des systèmes de Raisonnement à partir de cas intéresse un certain nombre de travaux, dont nous dressons un état de l'art. Parmi les méthodes déployées ayant trait particulièrement à la maintenance de la base de cas, nous situons notre contribution dans la réduction de la base de cas, et plus particulièrement sur une stratégie de suppression de cas basée sur un critère : la compétence. Une mesure est proposée inspirée des travaux existant dans la littérature et est illustrée par un premier test fait sur une base de 69 cas.
- Accès au texte intégral et bibtex
-

-
- titre
- Méthode de suppression de cas pour une maintenance de base de cas.
- auteur
- Mohamed-Karim Haouchine, Brigitte Chebel-Morello, Noureddine Zerhouni
- article
- 14ème Atelier de Raisonnement à Partir de Cas, RaPC'06., Mar 2006, Besançon, France. pp.39-50
- resume
- Nous vous présentons un début de travail concernant la maintenance de la base de cas. Après un état de l'art des travaux fait dans le domaine, nous sommes amenés à faire deux propositions que nous n'avons pas encore exploitées. Une solution sur la suppression de cas et une autre en utilisant les outils d'apprentissage automatique, sachant que nous pouvons modéliser notre base de cas sous forme d'exemples. La proposition se fait sur deux niveaux, sur des travaux d'apprentissage automatique et sur l'élaboration d'une nouvelle mesure.
- Accès au texte intégral et bibtex
-

2004
Master thesis
-
- titre
- Project of receiving a large affluence of victims in Sarreguemine's hospital
- auteur
- Samir Haouchine
- article
- Sciences du Vivant [q-bio]. 2004
- resume
- Depuis l'attentat de New York et l'explosion d'AZF la nécessité de l'élaboration d'unplan blanc intégrant les risques nucléaires, radiologiques , biologiques et chimiques ne prête plus à discussion.L'hôpital de Sarreguemines de par le nombre important de risques potentiels doitmettre sur pied un plan blanc pour paraître à l'éventualité d'un afflux massif devictimes. Ce plan, articulé avec l'organisation pré-hospitalière, défini les modalités deson déclenchement et de sa levée, la constitution de la cellule de crise, le rappel des personnels , l'organisation de la circulation, la gestion des lits et des blocs opératoires, la gestion des stocks, l'information des médias et des familles.Le rôle de chaque personne est défini par des fiches actions contenant des ordressimples, faisant l'objet d'un consensus et d'une large diffusion.Il est également nécessaire de veiller à la formation de tous les personnels et à laréalisation d'exercices grandeur nature.
- Accès au texte intégral et bibtex
-
